






Tutto sulla prossima EVA-70
A soli cinque giorni dalla EVA-69, Michael Hopkins e Victor Glover indosseranno di nuovo le EMU (Extravehicular Mobility Unit) per affrontare la prossima EVA (Extravehicular Activity) numero 70.
Hopkins è a questo punto alla sua quarta uscita, con un totale di 19 ore e 14 minuti di permanenza al di fuori della Stazione Spaziale. Glover invece è alla sua seconda EVA, con alle spalle le 6 ore e 56 minuti della precedente passeggiata spaziale.
La data prevista è per domani lunedì 1º febbraio e gli orari saranno verosimilmente gli stessi dell’ultima sortita. Si prevede infatti l’inizio della EVA per le ore 12:30 in Italia, contando come riferimento il passaggio dell’alimentazione elettrica degli scafandri da quella provvista via cavo dalla ISS a quella autonoma delle batterie interne alle EMU.
I passi di questa EVA
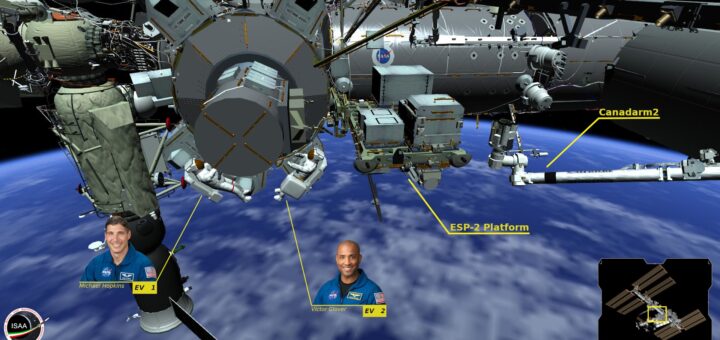
Uscita dall’Airlock
Stessi ruoli come per la precedente EVA. Michael Hopkins rivestirà il ruolo di EV-1 (responsabile della attività extraveicolare e identificato con delle bande rosse sulla tuta EMU) mentre Victor Glover sarà EV-2.
Come da prassi EV-1 sarà il primo ad uscire dalla camera di compensazione (Airlock) del modulo Quest. A volte però l’ordine di uscita può cambiare, come avvenne per esempio durante la EVA-23, quando Chris Cassidy onorò Luca Parmitano (alla sua seconda EVA) dandogli la precedenza nell’uscire all’esterno della ISS.
Avranno al loro seguito le prime borse degli attrezzi, necessarie allo svolgimento dei lavori da svolgere.
Nel caso in cui durante la lettura di questo articolo vogliate orientarvi meglio tra i vari moduli della ISS e le loro nomenclature, vi rimandiamo alla nostra Guida per immagini della Stazione Spaziale Internazionale.
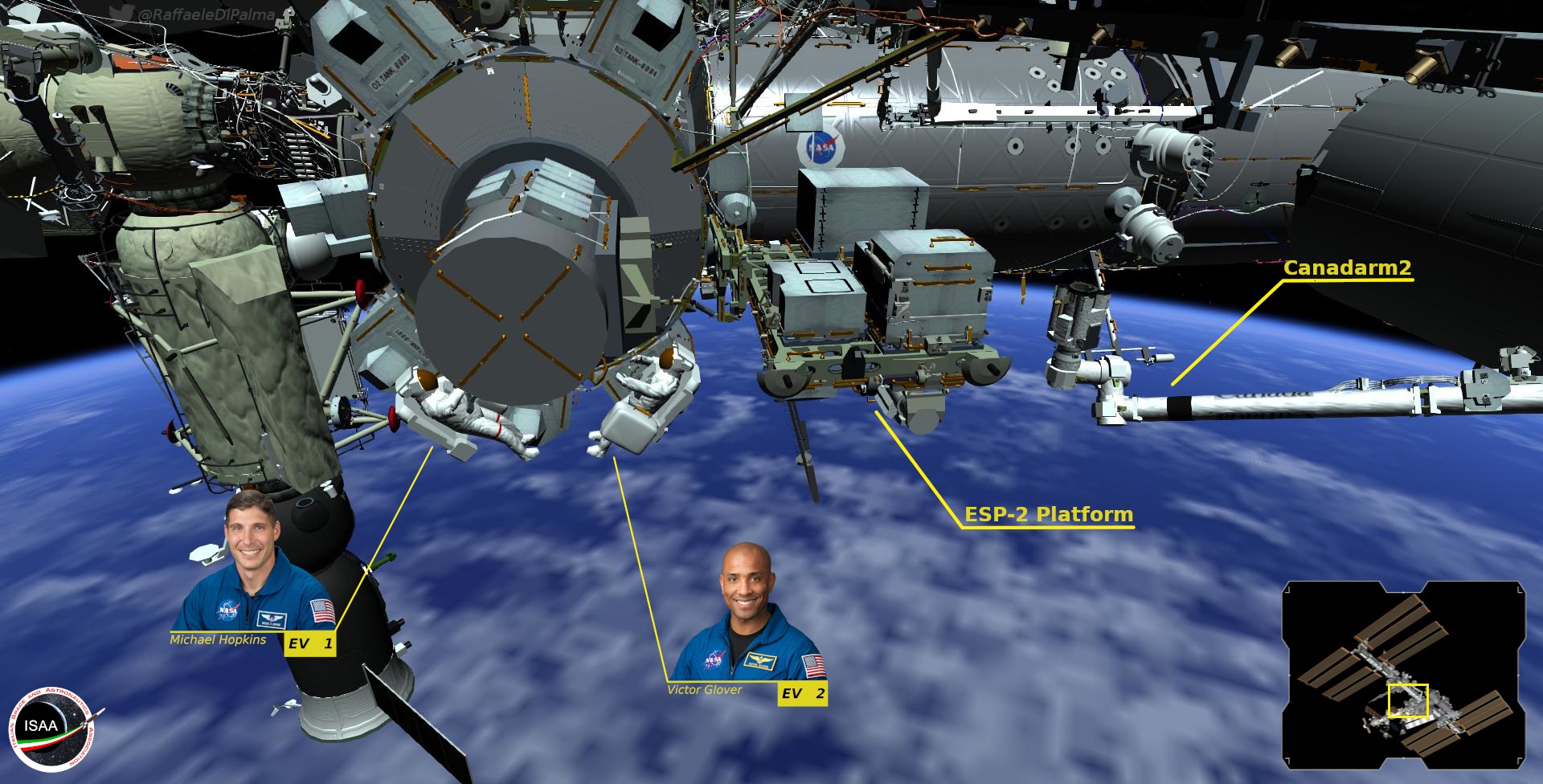
Trasferimento sull’elemento P4 del Truss
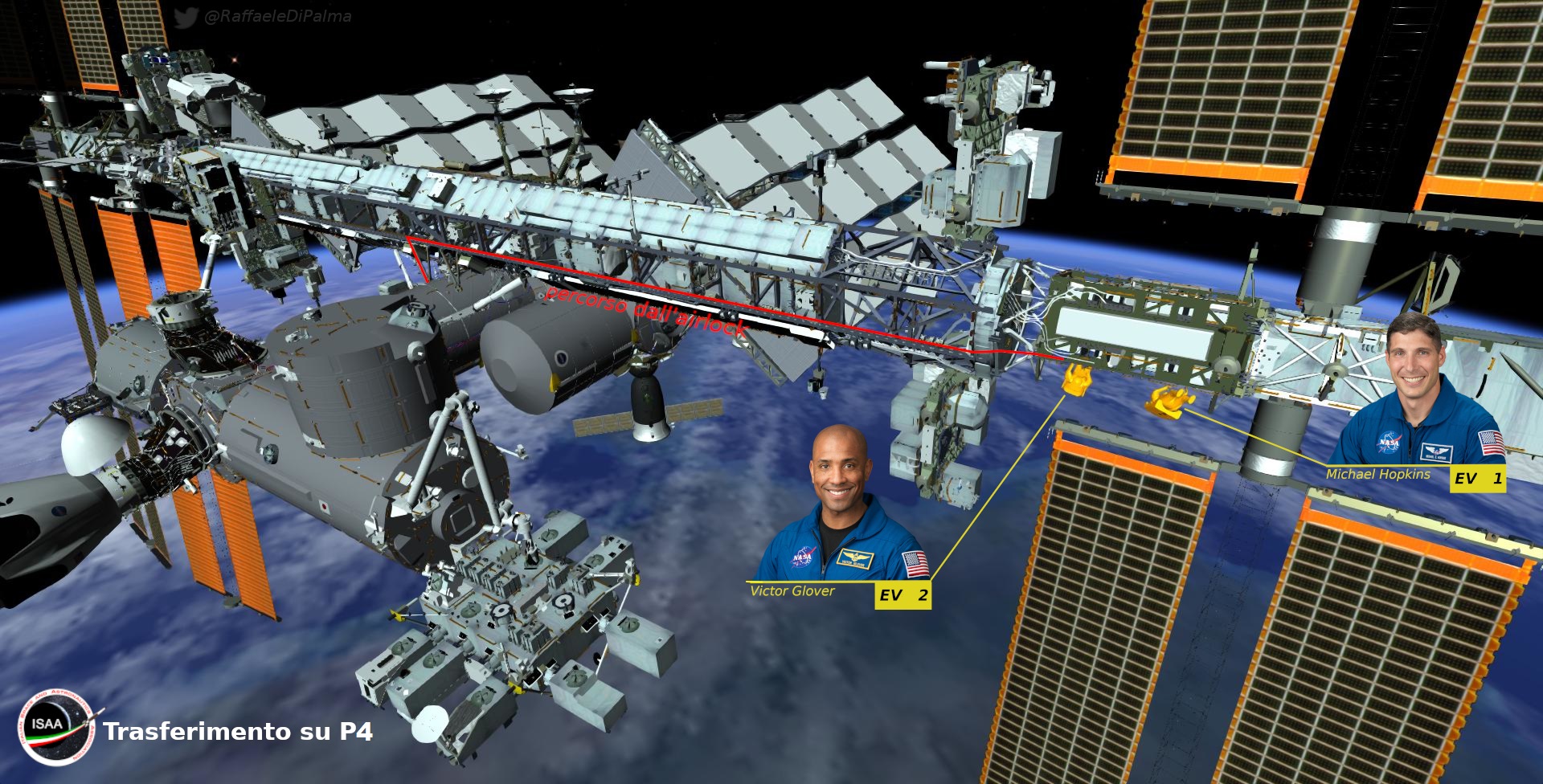
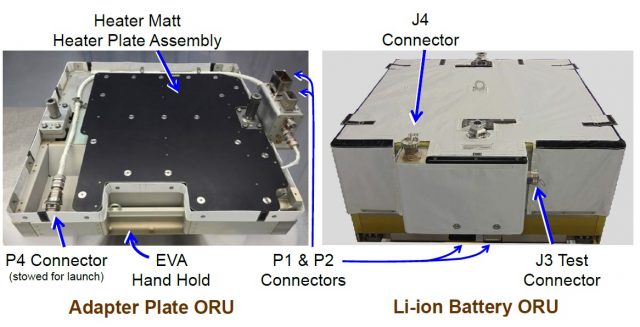
Il primo cantiere di lavoro sarà l’elemento P4 del truss (il traliccio della ISS), un modulo che accoglie la maggior parte delle batterie che accumulano l’energia prodotta dai pannelli fotovoltaici presenti sugli elementi P5 e P6.
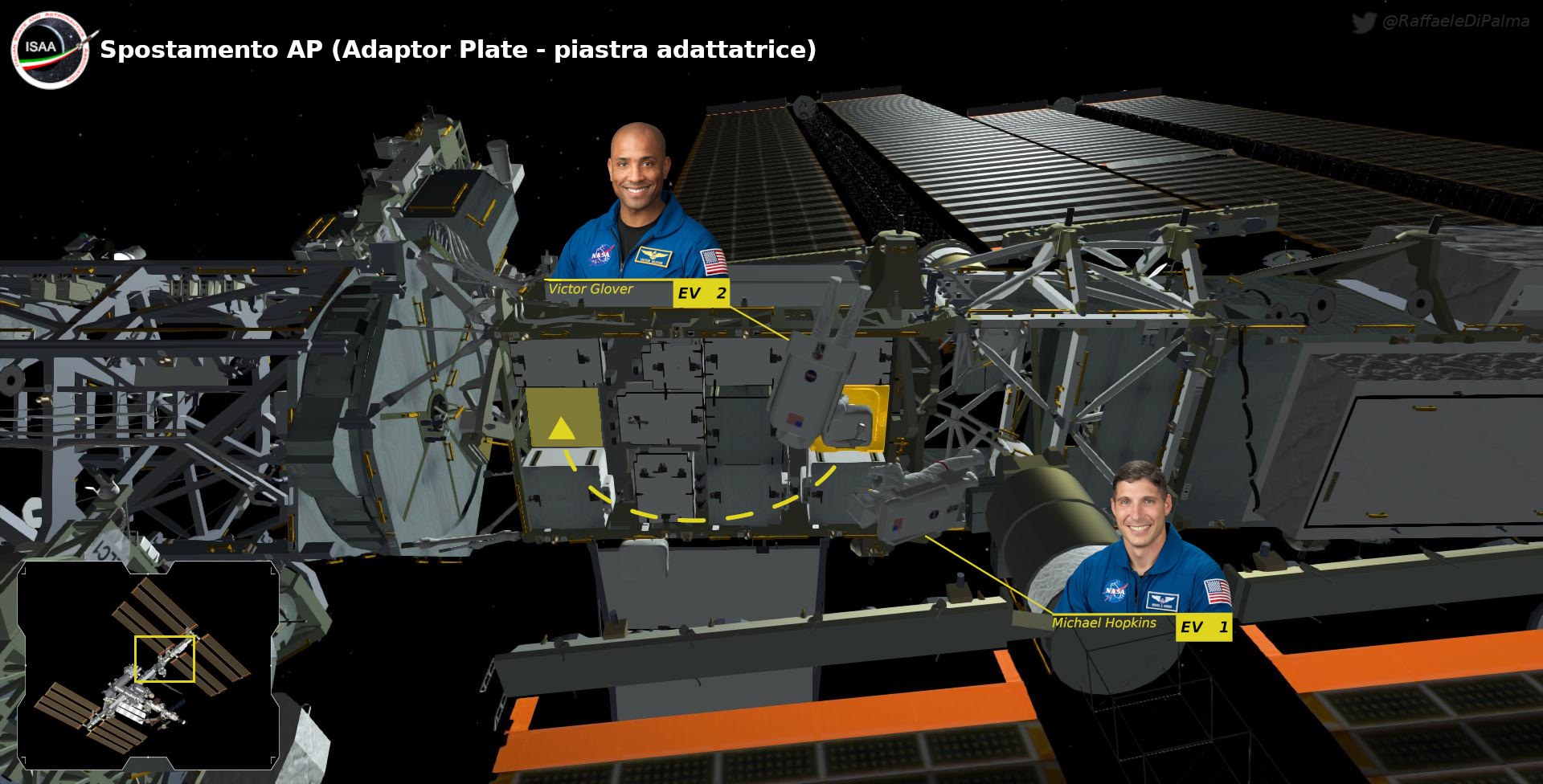
Qui EV-1 e EV-2 lavoreranno in concerto per lo spostamento di una piastra adattatrice (adapter plate), in virtù dei recenti ammodernamenti apportati al set di batterie della ISS.
Si è passati infatti negli ultimi anni dalle vecchie batterie al nichel-idrogeno, a dei più efficienti accumulatori a ioni di litio.
EV-2 ritornerà all’airlock mentre EV-1 rimuoverà una H-Fixture
Finito il lavoro con il circuito delle batterie, EV-2 ritornerà presso l’airlock per preparare la fase successiva della EVA.
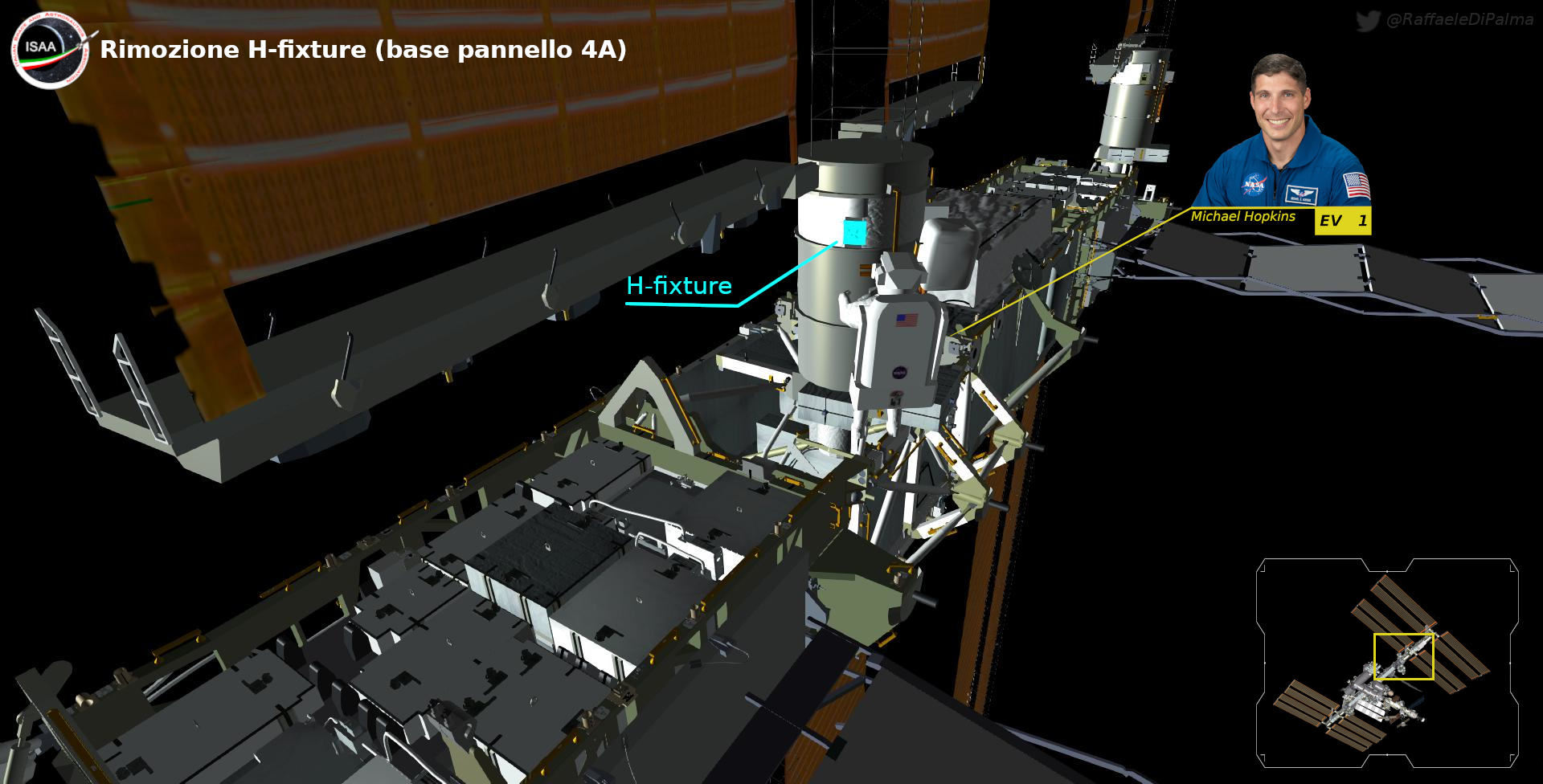
EV-1 intanto rimuoverà l’ennesima H-fixture (un’interfaccia per l’aggancio del braccio robotico DEXTRE), sempre in vista della futura installazione dei supporti per nuovi pannelli fotovoltaici iROSA.
Dopo aver finito lo smontaggio, EV-1 raggiungerà EV-2 presso l’airlock.
EV-1 preleverà un nuovo gruppo telecamere, mentre EV-2 monterà sul Canadarm2
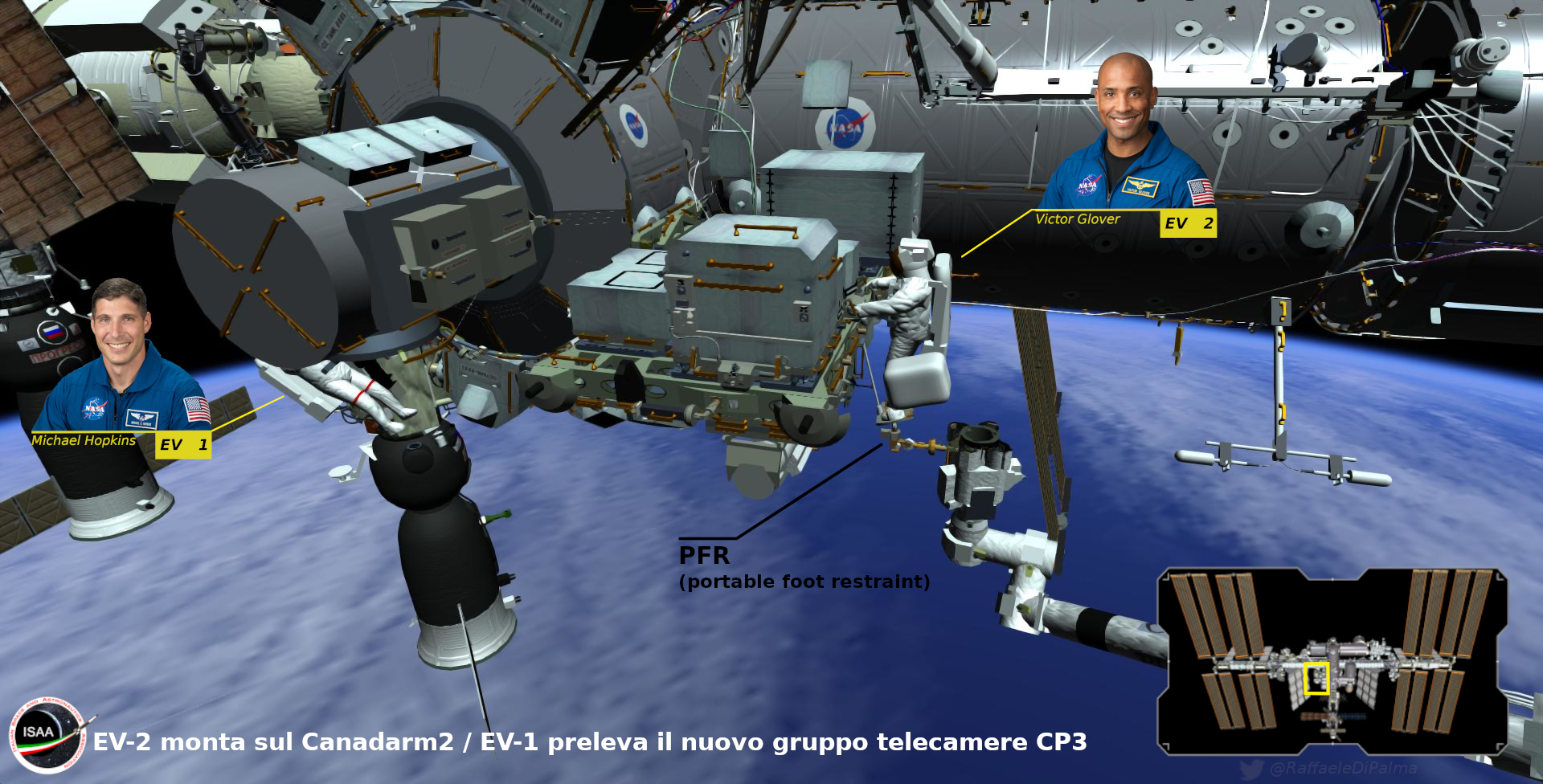
EV-2 avrà nel frattempo già montato il PRF (Portable Foot Restraint) alla testa del Canadarm2. Anche per questa EVA, Glover verrà spostato a bordo del braccio robotico mentre sarà assicurato alla piattaforma regolabile per l’aggancio dei piedi.
EV-1 intanto preleverà dall’airlock il nuovo gruppo di telecamere che andrà a sostituire quello ormai non più funzionante (denominato CP3), installato presso l’elemento S1 del truss.
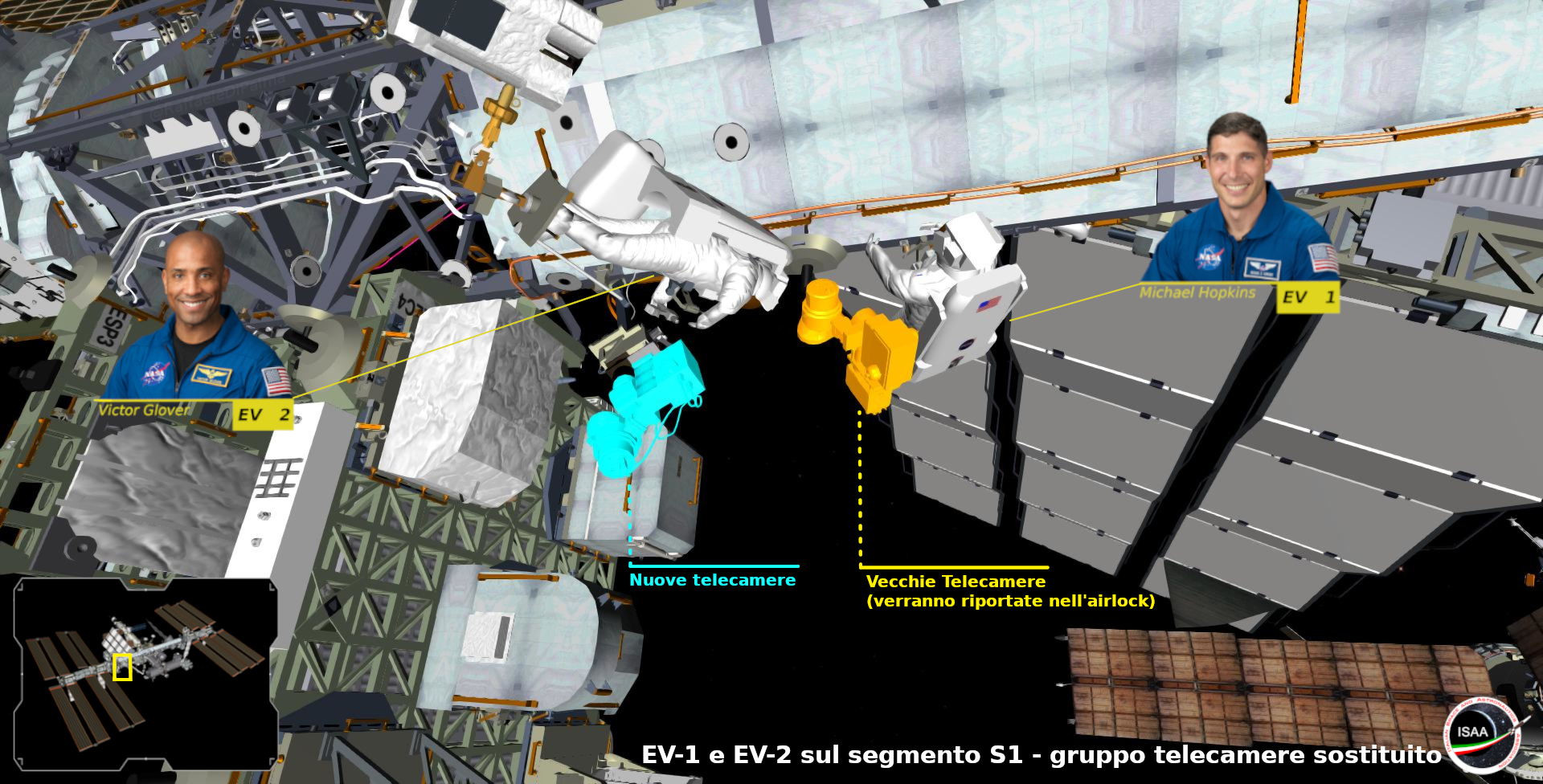
EV-1 e EV-2 si porteranno sotto il truss S1 per la sostituzione di un gruppo telecamere
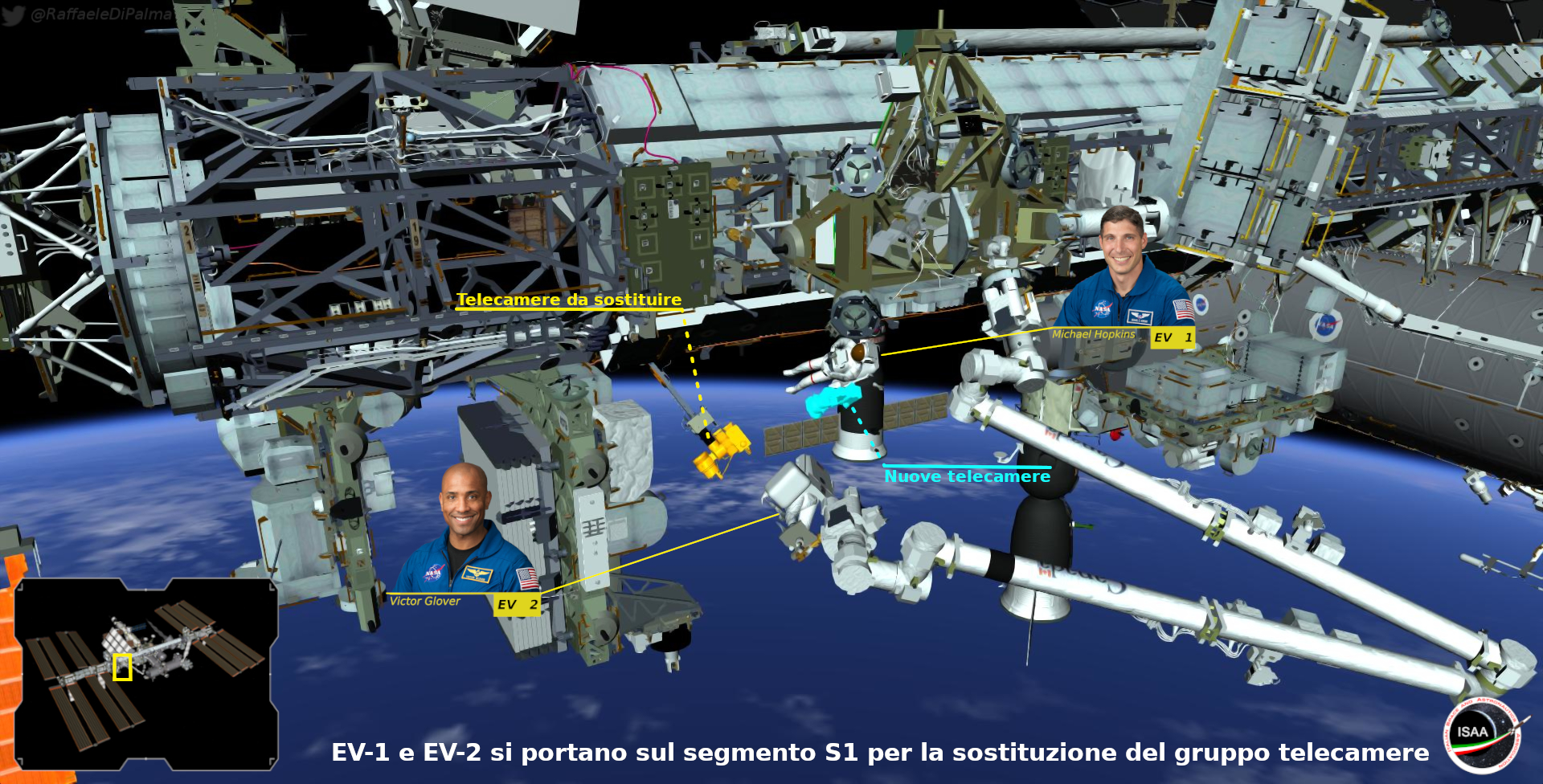
Come già detto, EV-2 arriverà al di sotto dell’elemento S1 grazie al Canadarm2, mentre EV-1 arriverà sul posto, grazie ai corrimano montati su ogni elemento della ISS.
Procederanno a rimuovere tutto il gruppo telecamere (che comprende anche un faro per l’illuminazione) presente sull’asta di supporto e lo sostituiranno con uno nuovo.
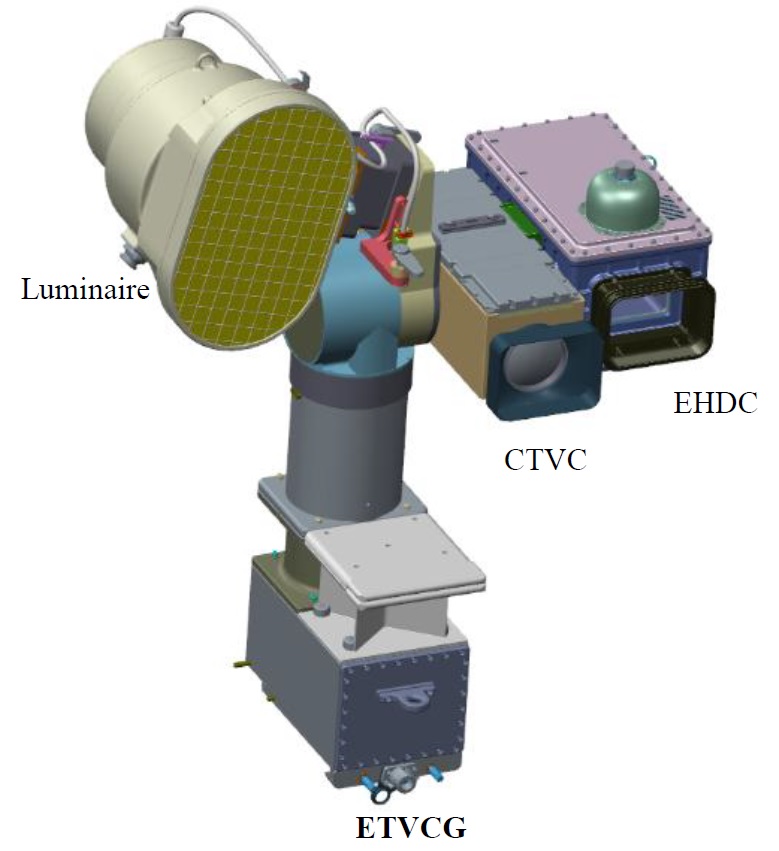
Il vecchio gruppo non verrà rilasciato nello spazio (come è stato fatto durante la EVA-69 per la copertura dell’antenna ColKa), ma verrà riportato all’interno della ISS, probabilmente per ulteriori analisi o riparazioni.
EV-2 procederà all’installazione di una nuova telecamera HD all’esterno del modulo Destiny

EV-2 verrà posizionato sempre grazie al Canadarm2 all’altezza del modulo Destiny per l’installazione di una nuova telecamera. Questa volta non sarà interessato a tutto il gruppo presente (denominato come CP 13) ma solo al montaggio di una telecamera HD.
Il nuovo elemento sarà già nella borsa che Glover avrà prelevato dal suo ritorno all’airlock.
EV-1 procederà alla sostituzione di un gruppo telecamere del braccio robotico JEMRMS

Durante l’installazione della nuova telecamera HD da parte di EV-2, EV-1 si porterà sulla piattaforma esterna per esperimenti del modulo nipponico Kibo.
È probabile che potremo godere di foto particolarmente belle di Michael Hopkins al lavoro sul braccio robotico, dato che sarà molto vicino alle due grandi finestre che affacciano sulla piattaforma esterna.
Verrà infatti sostituito il gruppo di telecamere e luci presenti sulla testa del braccio robotico giapponese JEMRMS (Japanese Experimental Module Robotic Manipulator System) che opera proprio per posizionare i moduli degli esperimenti da esporre al vuoto dello spazio.
Il nuovo set di telecamere verrà prelevato dall’airlock dopo aver posato quello sostituito in precedenza sul truss S1.

EV-1 connetterà la telecamera HD appena installata sul modulo Destiny
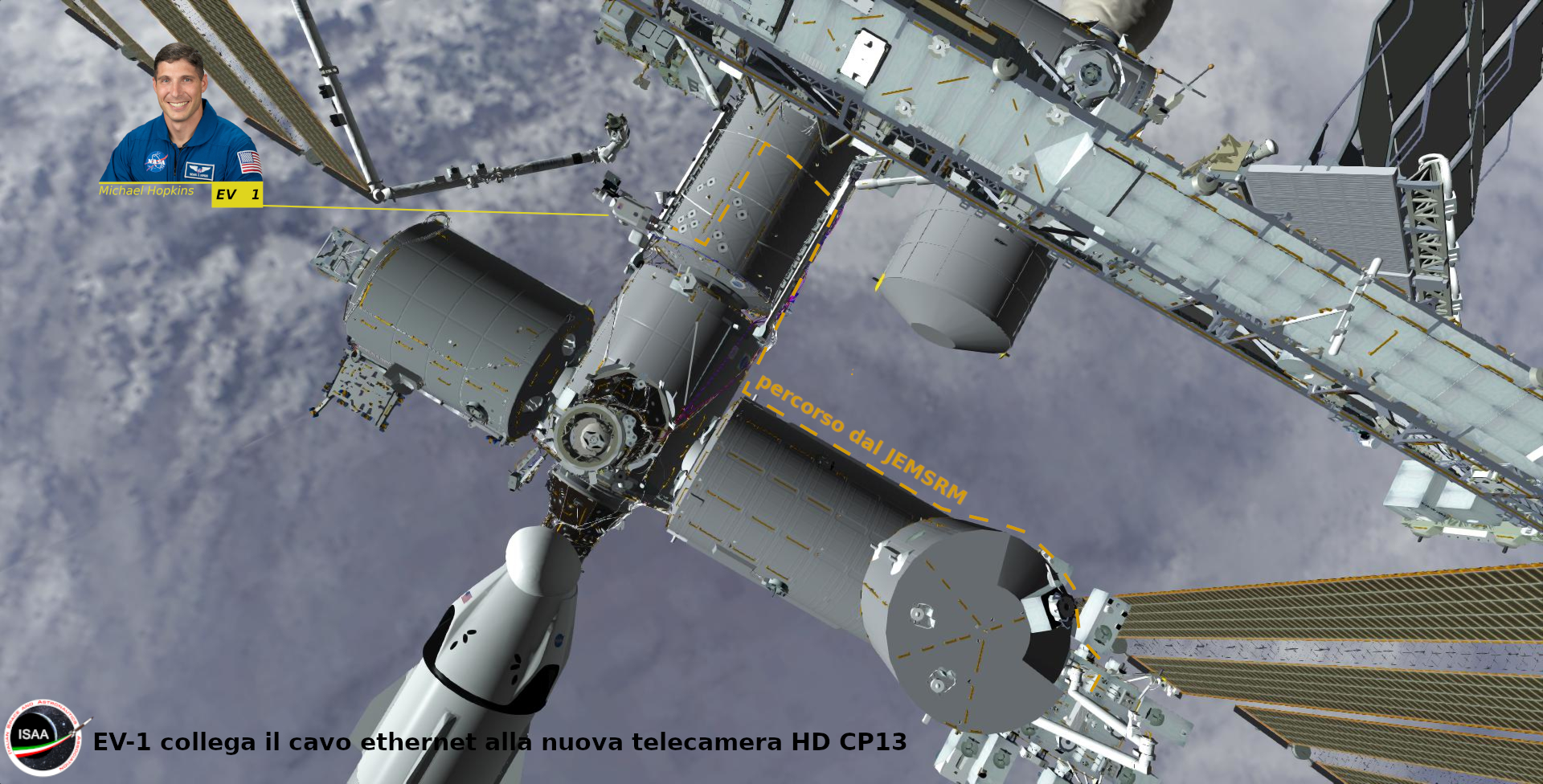
Di ritorno dal modulo Kibo, EV-1 farà una breve fermata presso la telecamera HD appena installata all’esterno del modulo Destiny da EV-2 e collegherà un cavo Ethernet che si trova attualmente alla base dell’asta di supporto alla base della nuova telecamera.
Fine della EVA e rientro all’airlock
Di solito le attività extraveicolari durano circa 6 ore e 30 minuti. Se dovesse avanzare del tempo o se dovesse rendersi fattibile un’estensione della durata standard, gli astronauti procederanno con le “get ahead task”. Si tratta di alcune piccole attività che possono spaziare da piccole riparazioni a spostamento di alcuni elementi ed attrezzature, in supporto alle EVA future.
Durante la precedente EVA-69, nonostante Hopkins e Glover abbiano correttamente svolto le attività di installazione all’esterno del modulo Columbus, si sono riscontarti alcuni problemi alle connessioni della piattaforma Bartolomeo.
In particolare, il cavo principale PAPOS non supporta al momento la connessione di tutti gli slot (scomparti per esperimenti) presenti. Inoltre un’antenna di una radio ARISS (un apparato del progetto Amateur Radio on ISS presente all’interno del modulo Columbus) risulta non collegata.
Attualmente non ci risultano attività per la EVA-70 collegate a queste problematiche che probabilmente verranno risolte in una EVA dedicata.
 Questo articolo è copyright dell'Associazione ISAA 2006-2026, ove non diversamente indicato. - Consulta la licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
Questo articolo è copyright dell'Associazione ISAA 2006-2026, ove non diversamente indicato. - Consulta la licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
Fin da piccolo ho seguito la fantascienza con molto interesse. L’immensità dell’universo mi affascina e le conquiste pacifiche degli umani mi esaltano. Se avessimo la consapevolezza di operare per il bene comune e uscire dalla barbarie e egoismo in cui viviamo saremmo più felici.