






Tutto sulla prossima EVA-69
Gli astronauti Victor Glover e Michael Hopkins saranno i protagonisti della prossima attività extraveicolare (Extra Vehicular Activity – EVA) numero 69.
Per Glover, alla sua prima missione in orbita, si tratta ovviamente della prima EVA. Hopkins invece ha già accumulato nel 2014 (durante l’incremento delle Expedition 37/38) un totale di 12 ore e 58 minuti in 2 sortite esterne, le numero 24 e 25.
Tra non molto li vedremo impegnati in una serie di aggiornamenti molto importanti alla struttura della ISS: mentre scriviamo, la data prevista è al 27 gennaio.
Il teatro principale dell’operazione sarà l’esterno dello scafo pressurizzato del modulo europeo Columbus.
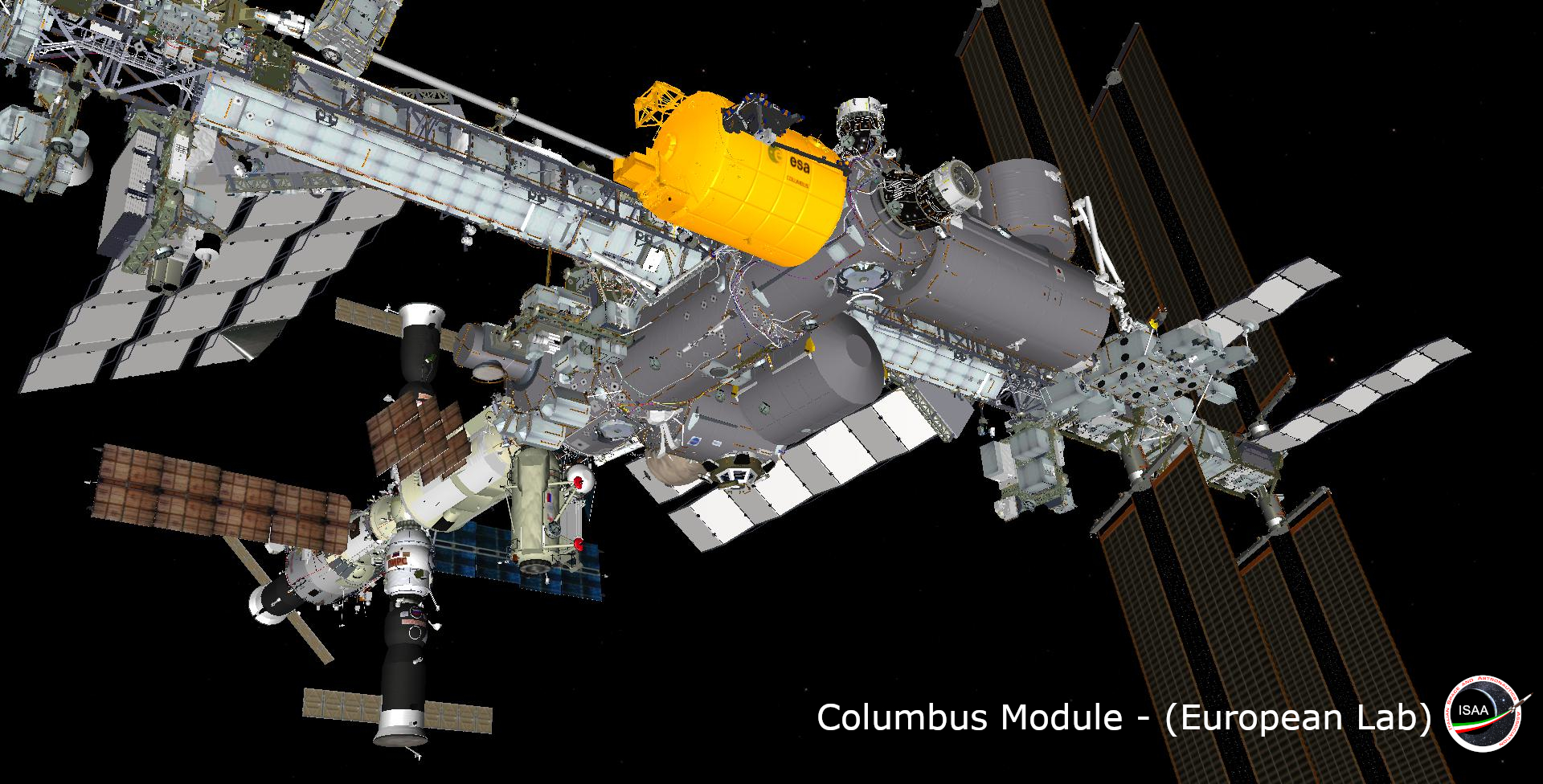
Il compito della missione è realizzare un importante upgrade che aumenterà sia le capacità di ospitare esperimenti a bordo sia la velocità nelle trasmissione dei dati scientifici.
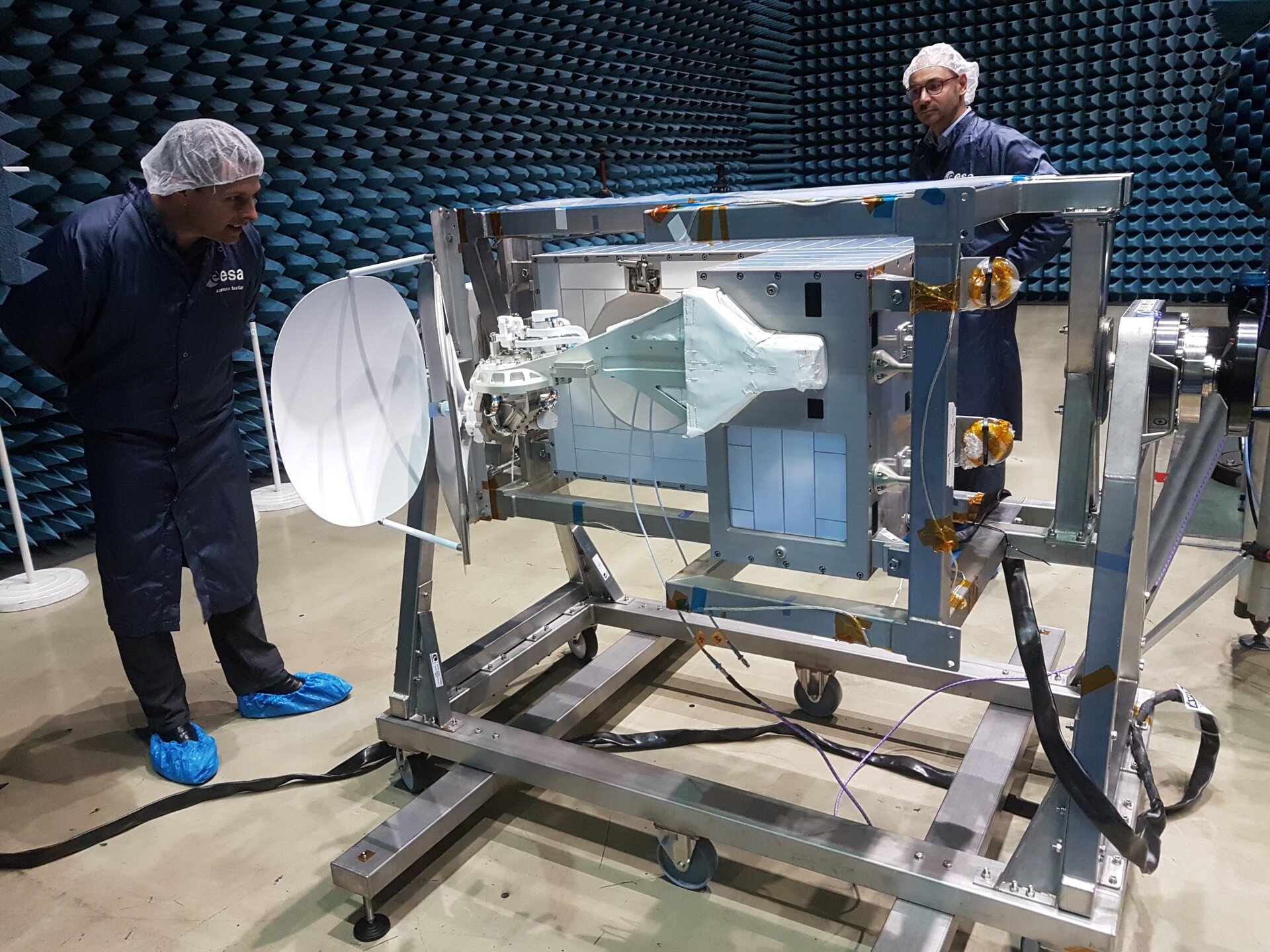
Sarà infatti installata la nuova antenna ColKa, che permetterà la trasmissione dei dati raccolti dagli strumenti scientifici fino a 50 Mb/s in downlink e fino 2 Mb/s in uplink, sfruttando la banda Ka (una banda di frequenze nello spettro delle microonde).
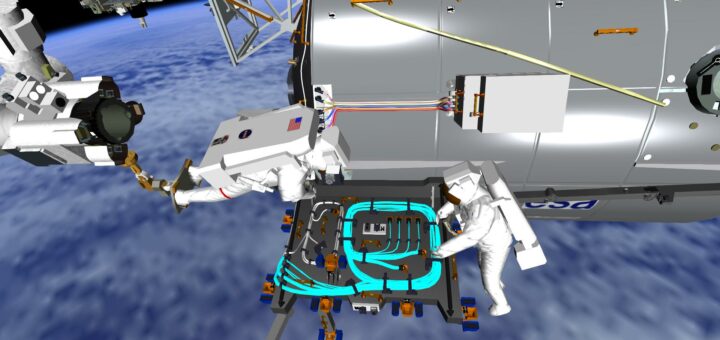
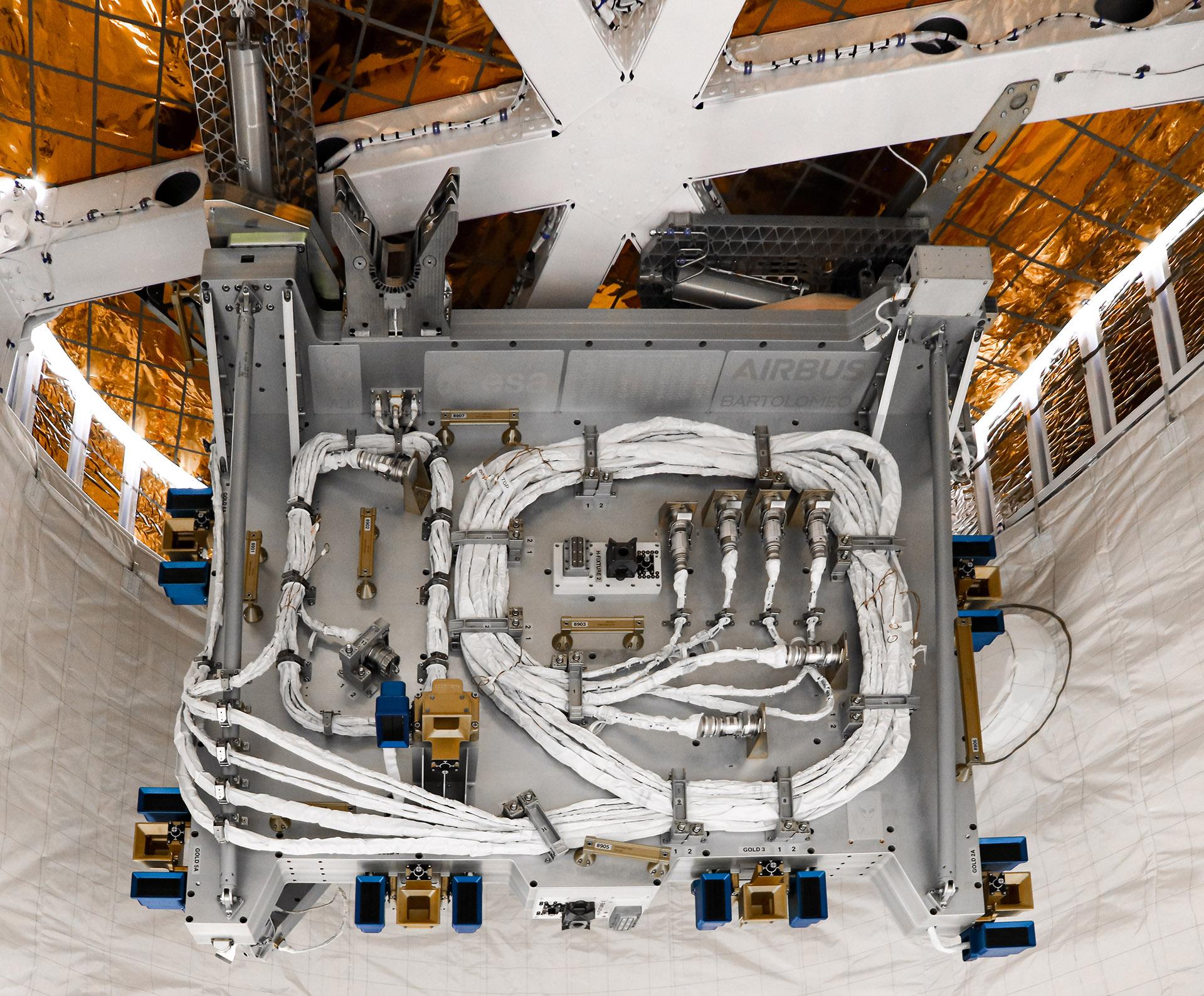
Saranno anche dispiegati e connessi i cavi dati/energia che interfacceranno la piattaforma per esperimenti esterni Bartolomeo al modulo Columbus.
I passi di questa EVA
Illustreremo in questo articolo tutti i passaggi principali della coreografia prevista per EVA-69: dall’uscita degli astronauti all’esterno della Stazione Spaziale, fino al completamento degli obiettivi previsti.
Prima di iniziare ricordiamo però che la preparazione materiale di qualsiasi EVA (al di là della progettazione a terra) comincia a bordo della ISS già diversi giorni prima della data prevista.
Dapprima vengono meticolosamente assemblate e controllate sia le tute EMU (Extravehicular Mobility Unit) sia tutte le attrezzature e le componenti necessarie, poi si ripassano e si aggiornano le procedure, anche in base alle istruzioni che arrivano da Terra. Bisogna essere sempre pronti a piccoli o grandi cambiamenti nelle coreografie meticolosamente cesellate, perché alcune variazioni possono arrivare anche a poche ore dall’evento.
Arrivati al giorno della EVA, le prime ore vengono impiegate per indossare le EMU, ambientarsi al loro interno ed eliminare ogni differenza di pressione tra la camera di compensazione e lo spazio esterno. Una volta che tutto è in regola si può procedere all’uscita dalla stazione.
Uscita dall’Airlock Quest
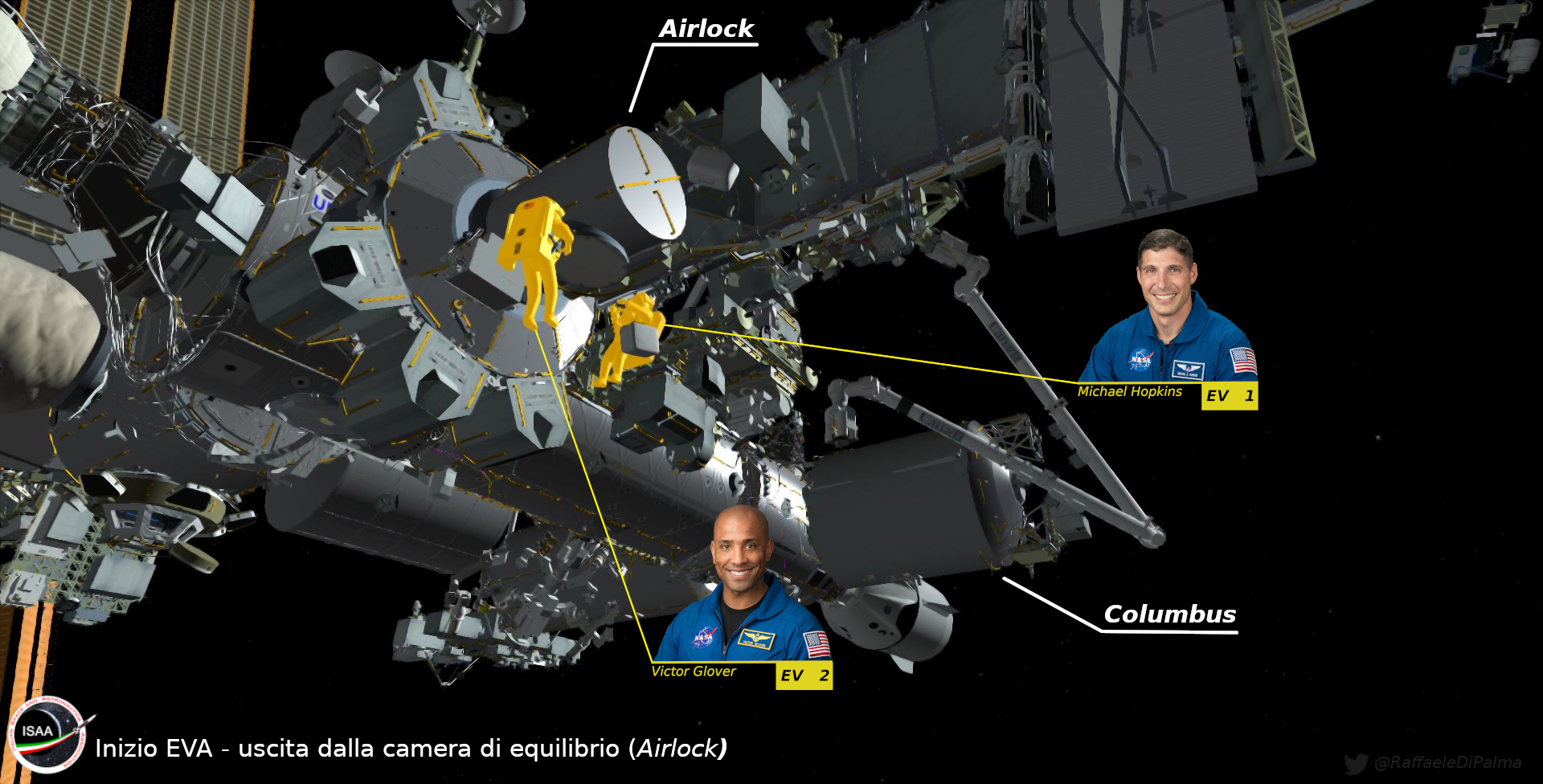
Verrà quindi il momento dell’apertura del portello della camera di compensazione (in inglese, airlock) del modulo Quest. Non appena fuori, Michael Hopkins (a cui andrà il ruolo di EV-1, in quanto responsabile della attività extraveicolare) prenderà la borsa che contiene alcuni degli attrezzi necessari allo svolgimento dei lavori.
Victor Glover (a cui verrà assegnato il ruolo di EV-2) si farà invece carico del trasporto dell’antenna ColKa e dei suoi cavi già collegati a essa.
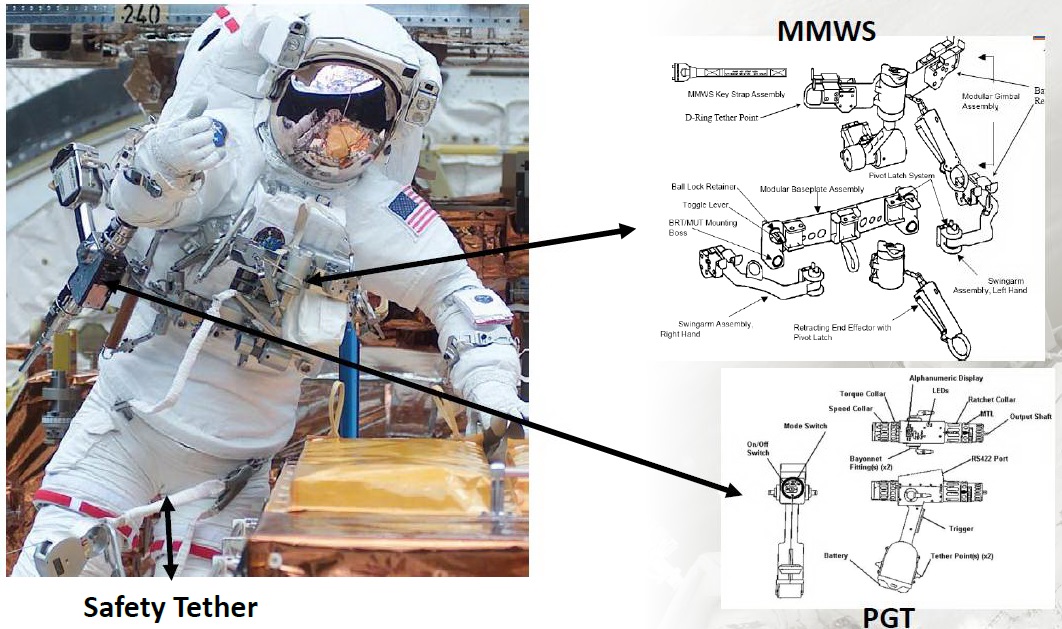
Oltre a questo gli astronauti hanno tutta una serie di strumenti agganciati direttamente alla tuta EMU grazie a un supporto chiamato mini workstation.
Michael Hopkins (EV-1) si sposta verso il modulo Columbus
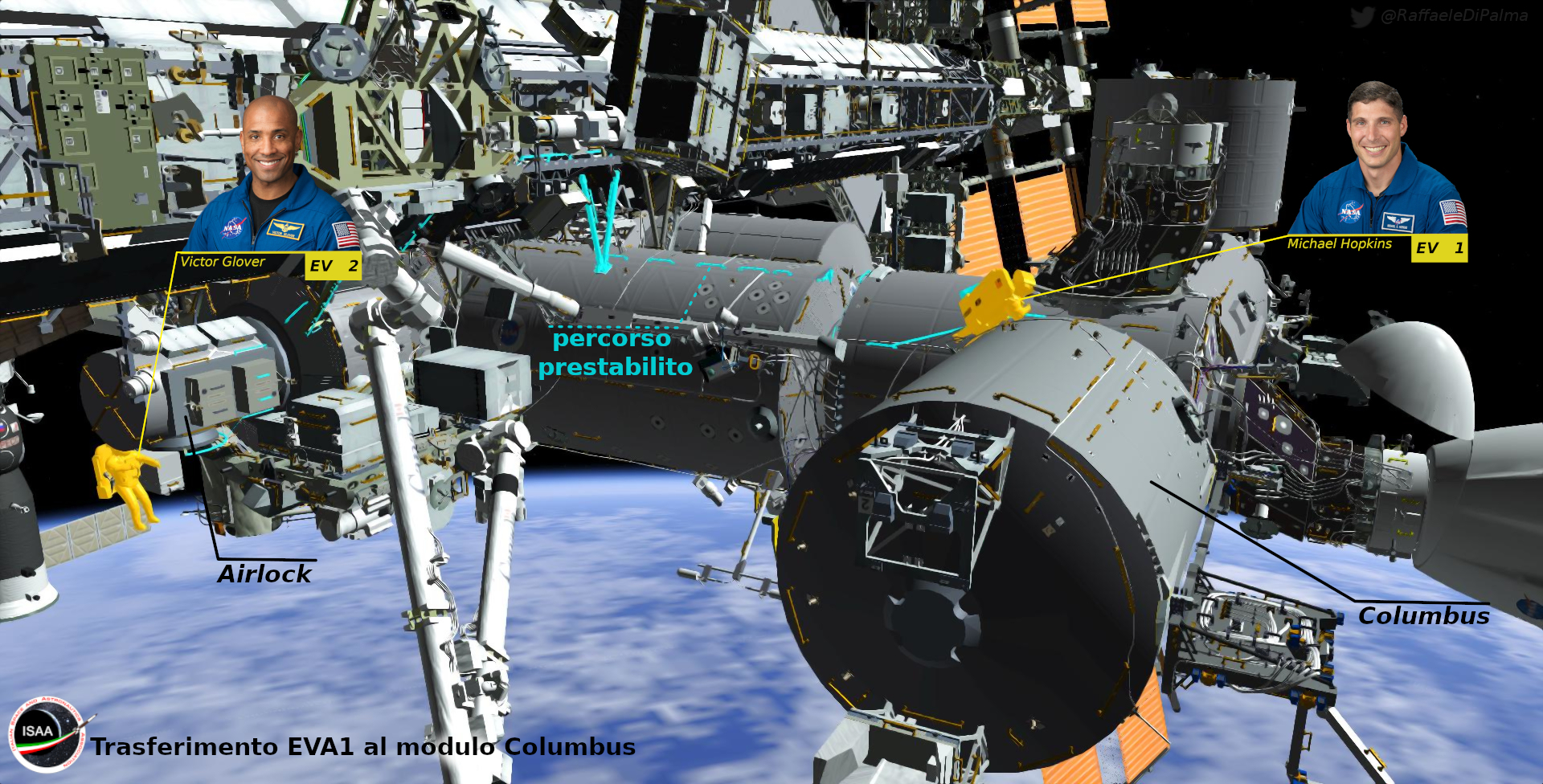
Michael Hopkins (da ora EV-1) comincierà il suo percorso prestabilito verso l’esterno del modulo Columbus. Nella rappresentazione sono stati evidenziati in azzurro i corrimano di cui si prevede l’utilizzo. Questi percorsi vengono stabiliti in anticipo non solo per agevolare lo spostamento degli astronauti, ma anche per tenere in conto diverse limitazioni o punti a cui prestare particolare attenzione, come per esempio la presenza di antenne nelle immediate vicinanze, che possono arrecare disturbi alle comunicazioni se non possono essere spente.
Alcuni appigli devono essere presi in particolare considerazione a causa degli impatti con micrometeoriti. Questi possono creare infatti dei piccoli crateri con bordi taglienti, che potrebbero causare un potenziale danno ai guanti delle tute EMU.
Victor Glover (EV-2) assembla PFR al Canadarm2

Mentre EV-1 proseguirà all’esterno del modulo Columbus, Victor Glover (da ora EV-2) si porterà vicino alla vicina piattaforma esterna ESP-2 (External Stowage Platform-2), una piattaforma usata per lo stoccaggio di pezzi di ricambio per la ISS.
Da quella posizione attenderà l’arrivo in sua prossimità del braccio robotico. Questo per permettere il montaggio della base di aggancio per i piedi PFR (Portable Foot Restraint) alla testa del Canadarm2. Una volta assicuratosi alla PFR, EV-2 verrà trasportato direttamente dal Canadarm2 all’esterno del modulo Columbus.
Ai comandi della postazione di controllo principale del Canadarm2, ci sarà l’astronauta Kathleen Rubins, con Soichi Noguchi in supporto, alla postazione di riserva.
Preparazione dell’area di lavoro
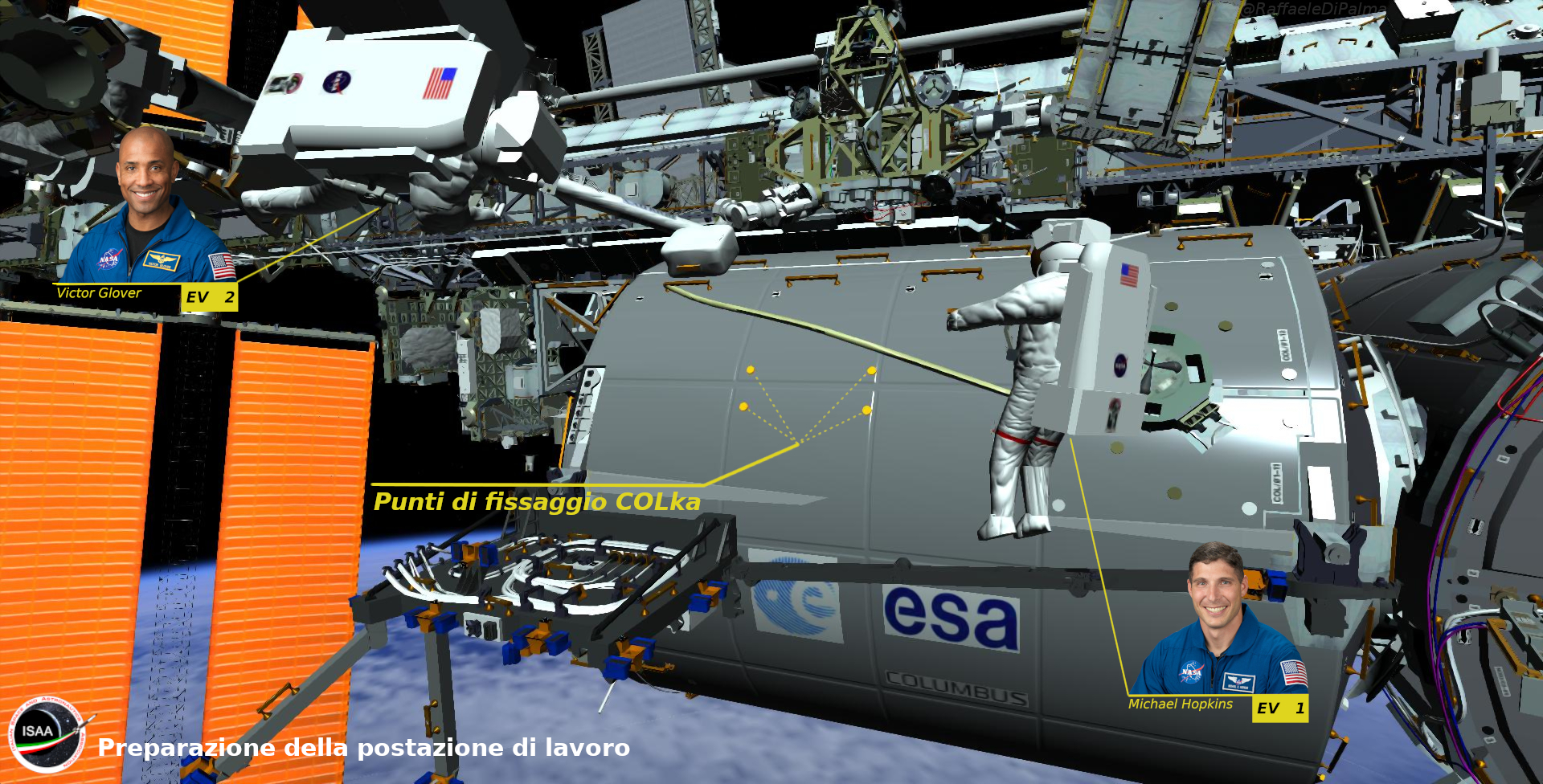
Mentre EV-1 starà iniziando i preparativi, EV-2 lo raggiungerà a bordo del Canadarm2.
Verranno assicurate le varie attrezzature e strumenti che gli astronauti hanno portato all’esterno della ISS. Questo grazie a una serie di cavi dotati di moschettoni che vengono agganciati solitamente alle maniglie usate per gli spostamenti o a stutture di sostegno.
All’esterno del modulo Columbus, EV-1 applicherà ai pannelli anti micrometeoriti (MMOD shield) due particolari maniglie.
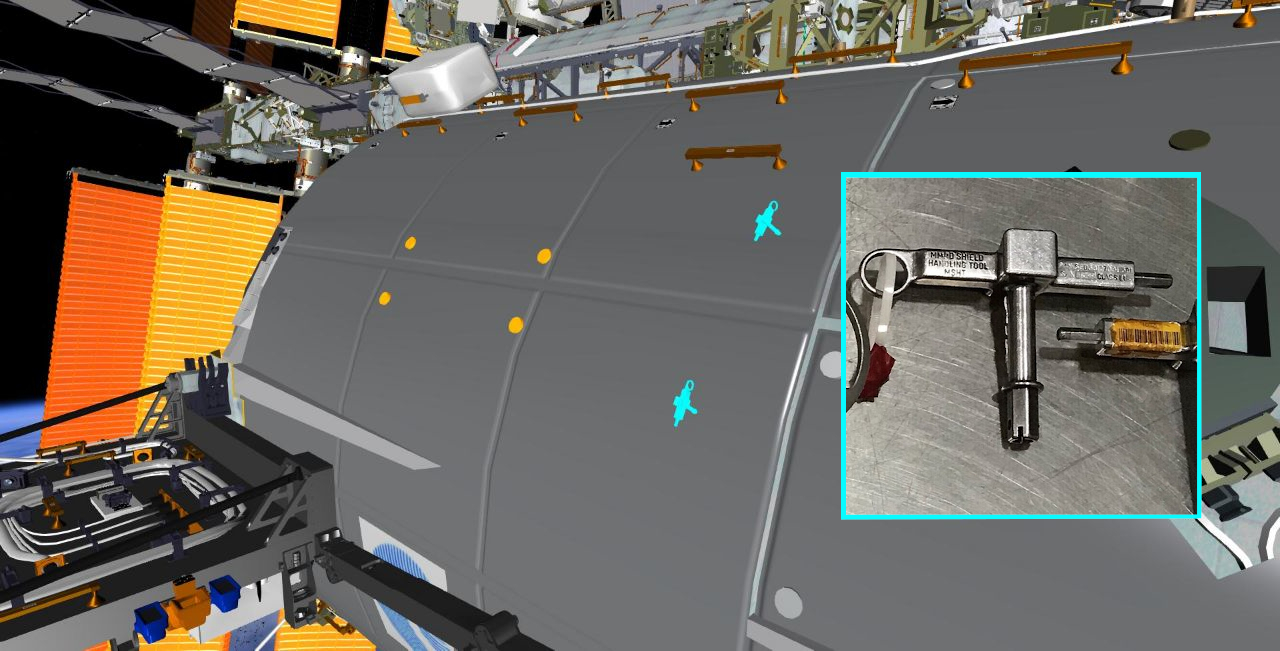
Queste maniglie si agganciano in apposite fessure già presenti e vengono usate per movimentare i pannelli quando devono essere installati o rimossi. In questo caso, forniranno un ulteriore punto di aggancio per la strumentazione o per cavi di sicurezza aggiuntivi, su cui far affidamento durante i lavori.
Installazione e cablaggio dell’antenna ColKa allo scafo del modulo Columbus
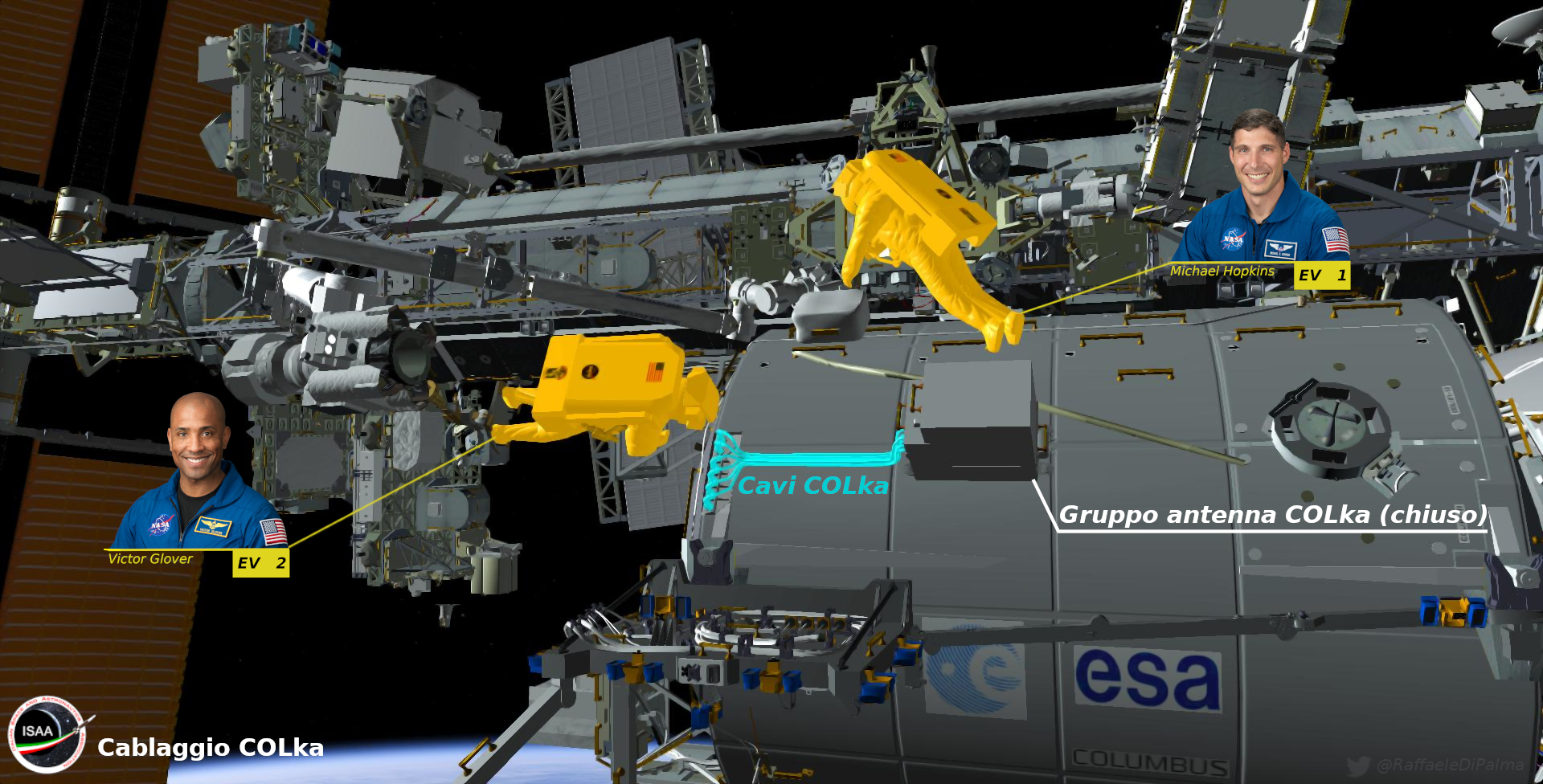
ColKa verrà fissata direttamente sullo scafo esterno del modulo Columbus, a quattro punti di ancoraggio, grazie all’ausilio del Pistol Grip Tool (PGT).

Si tratta in pratica di un avvitatore a batteria che, pur operando in maniera piuttosto lenta, riesce a esercitare la forza necessaria per il fissaggio richiesto.
Il PGT può limitare il valore della coppia applicata e in più offre la sicurezza di un blocco della torsione, nel caso si superi un determinato angolo prestabilito, in modo da evitare indesiderati avvitamenti degli astronauti. Le batterie possono essere sostituite anche nel corso di una EVA.
Dopo aver controllato che il fissaggio sia stato eseguito in maniera corretta, si passerà al collegamento dei cavi (già montati sul blocco antenna) ai connettori.
Controllo dei connettori di ingresso su Columbus

Mentre EV-2 starà completando il collegamento dei cavi dell’antenna ColKa, EV-1 si porterà al lato opposto del modulo Columbus per un controllo agli ingressi che ospiteranno i connettori dei cavi della interfaccia PAPOS (Payload Parking Position Interface) presente su Bartolomeo.
Tutti i materiali usati per la costruzione dei moduli della ISS sono certificati per resistere agli estremi sbalzi termici e al vuoto dello spazio. Un’occhiata extra però è sempre ben accetta, soprattutto se si tiene conto che il modulo Columbus è in orbita ormai dal 2008.
Una volta verificato che tutto sia a posto EV-1 ritornerà nelle vicinanze della piattaforma Bartolomeo per dare inizio alla prossima sequenza di eventi.
Rilascio dei fermacavi PAPOS
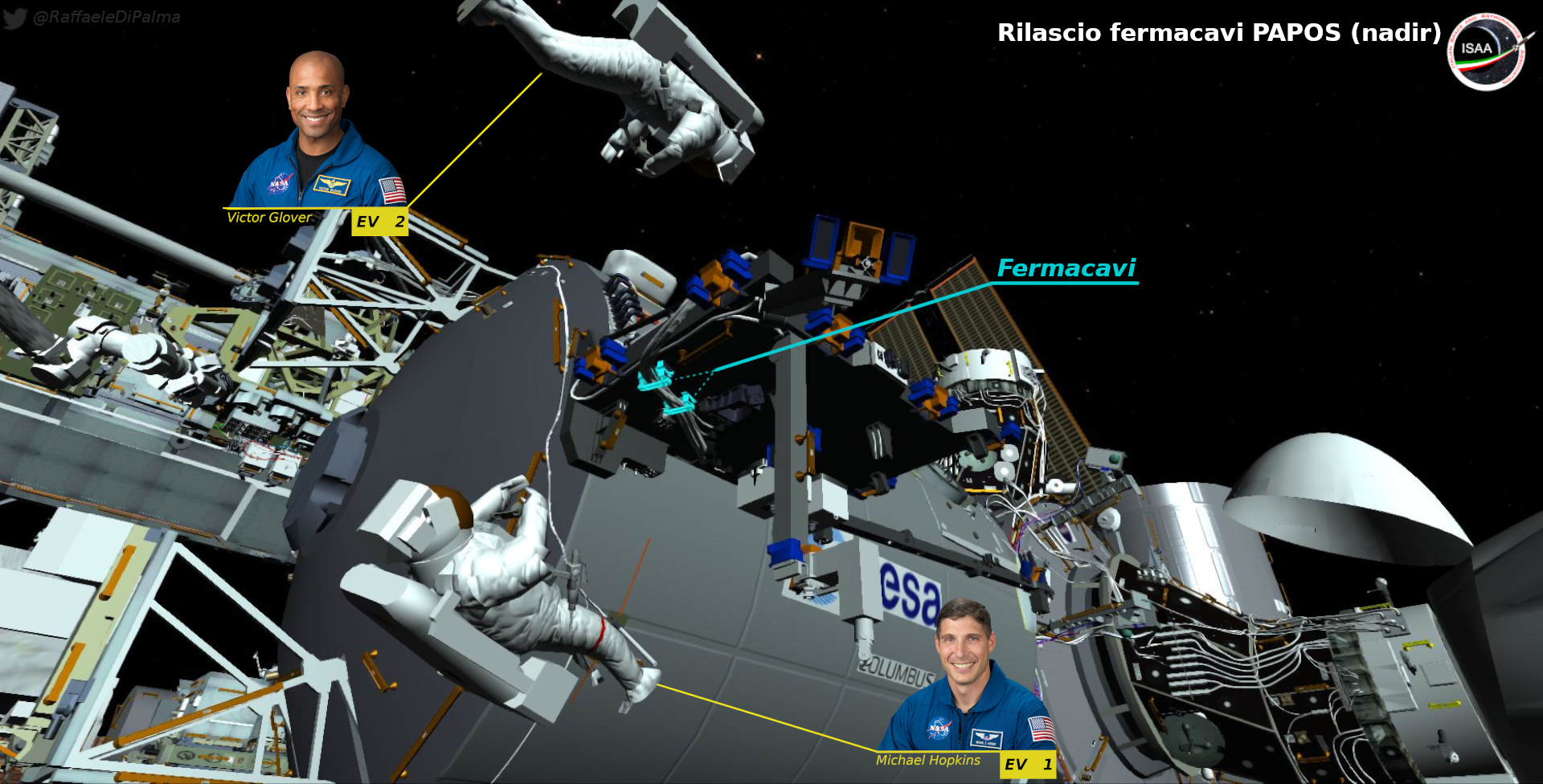
Mentre EV-2 rimarrà fermo in posizione sul Canadarm2 (per riposare o fare foto all’antenna appena installata), EV-1 inizierà ad aprire i blocchi dei cavi del PAPOS. Prima dal lato a nadir, per poi passare a quelli posti allo zenit.

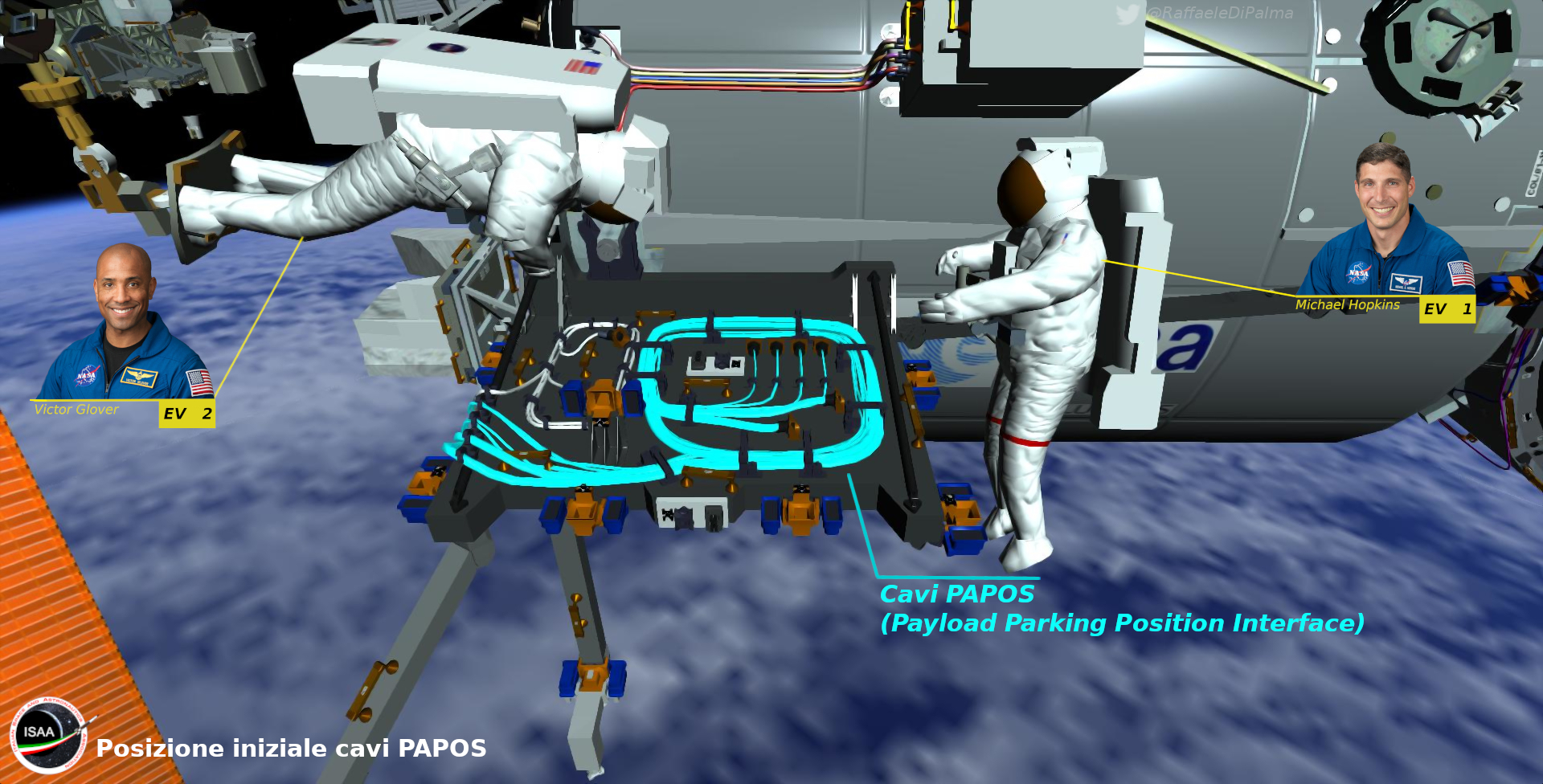
Dispiegamento e connessione dei cavi PAPOS
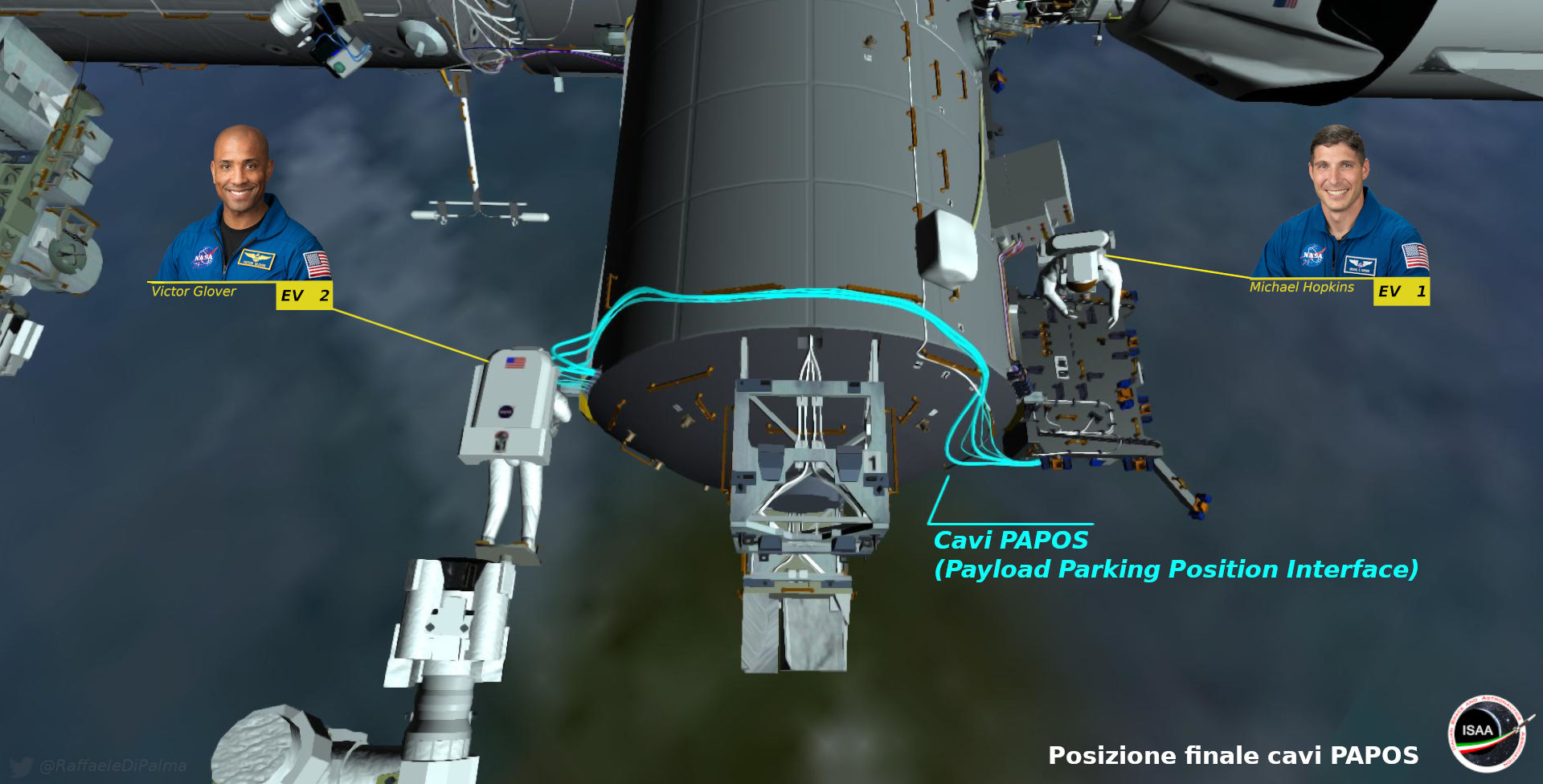
EV-2 provvederà al dispiegamento e alla connessione del gruppo dei cavi PAPOS. Sempre agganciato a Canadarm2, sistemerà il tutto passando dal lato allo zenit di Columbus.
Terminerà poi l’operazione connettendoli agli ingressi precedentemente ispezionati da EV-1.
Dispiegamento e connessione cavo antenna Bartolomeo

Alla messa in posa del cavo dell’antenna di Bartolomeo penserà EV-1, ripetendo più o meno la stessa sequenza di azioni adottate per il precedente gruppo di cavi.
Verranno rilasciati i fermi che lo mantengono in sede provvisoria e verrà poi esteso fino al suo punto di connessione, che si trova di fianco a quello usato per il cavo dell’antenna ARISS (Amateur Radio on ISS).
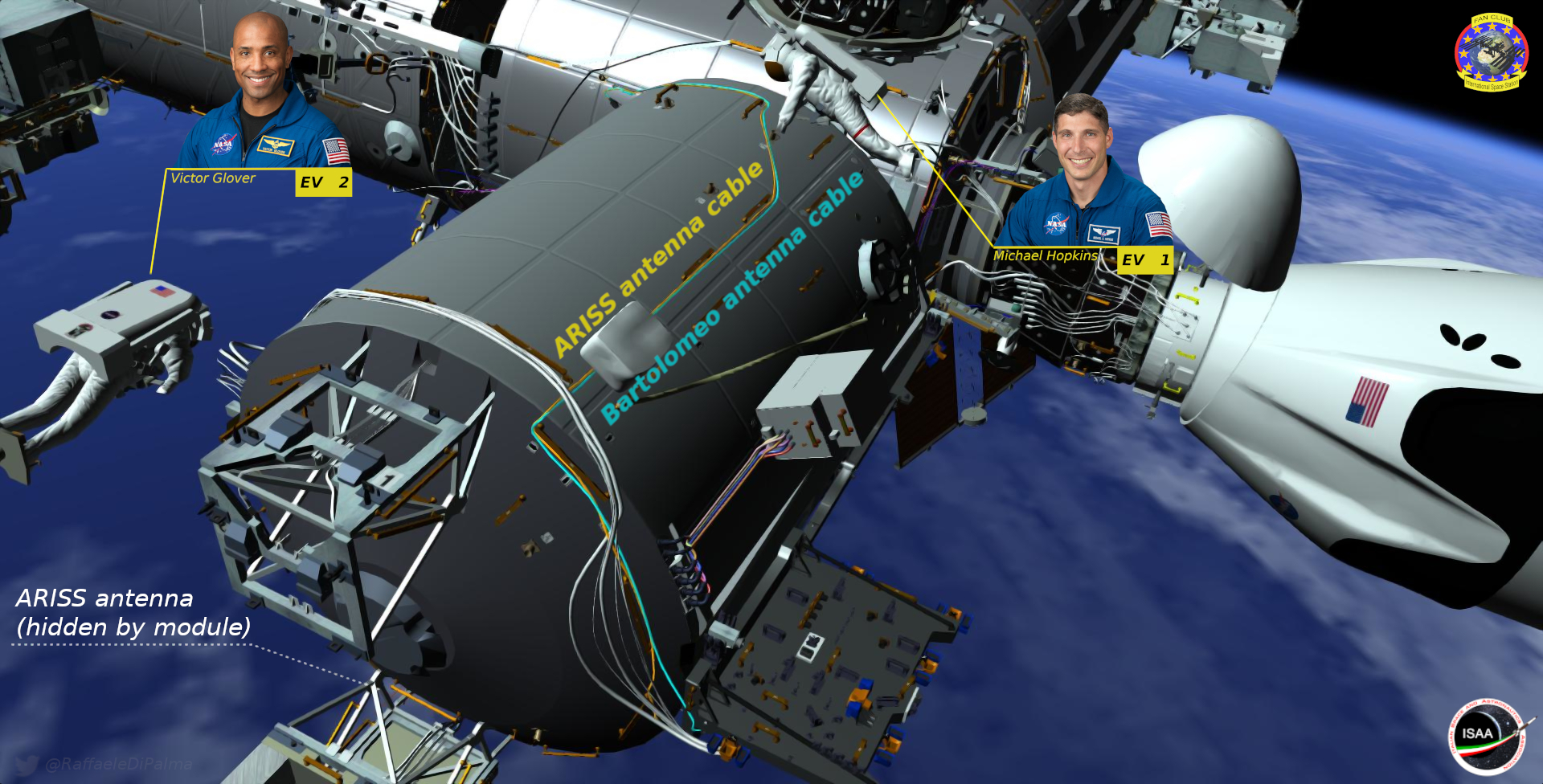
Con il cavo ARISS infatti, condividerà parte del percorso fino alla zona dei connettori.
Rimozione ed espulsione della copertura provvisoria dell’antenna ColKa
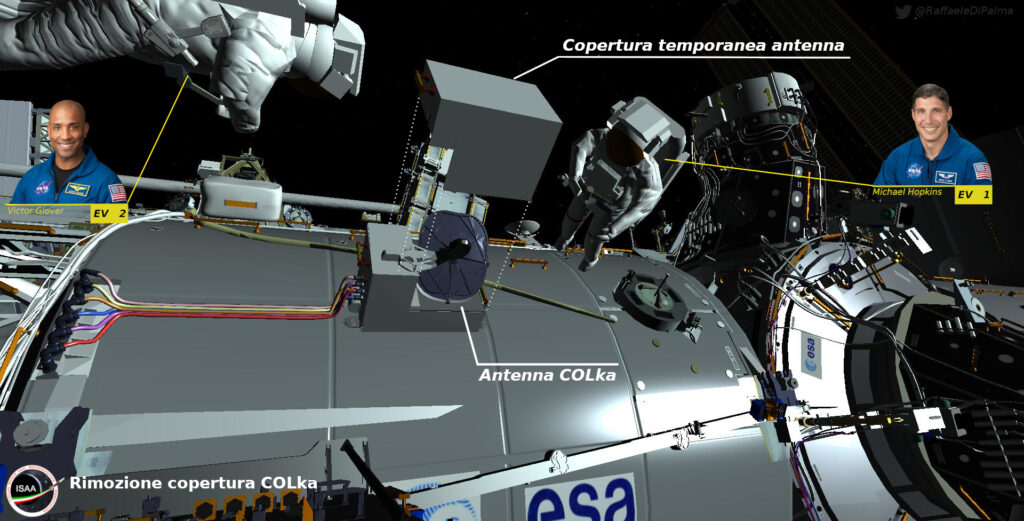
I due astronauti rimuoveranno la copertura temporanea dell’antenna ColKa. Da ora in poi sarà visibile la parabola che donerà al modulo Columbus la connettività ad alta velocità verso Terra.
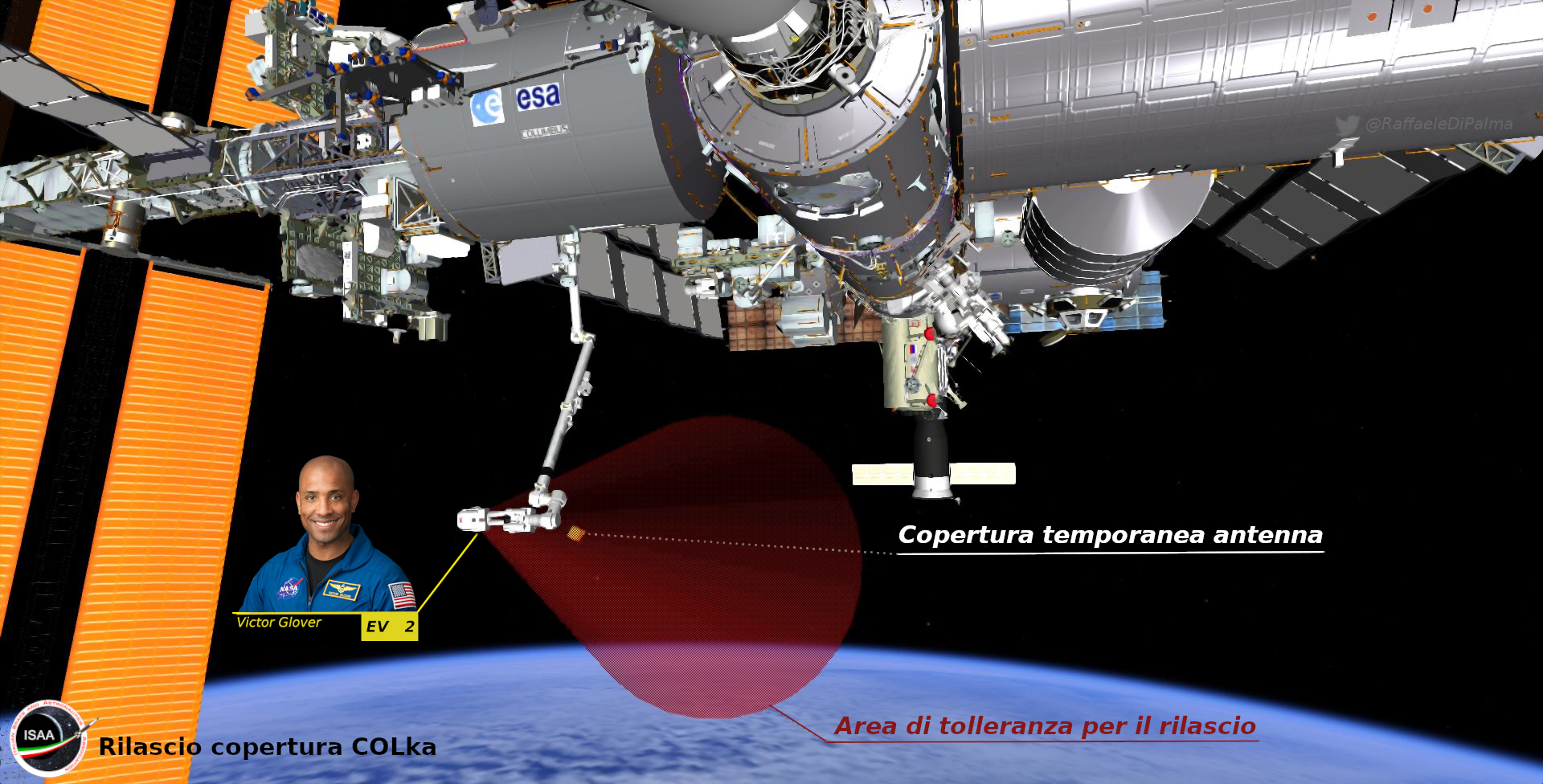
Una volta smontata la copertura verrà presa in carico da EV-2 che la porterà al di sotto della ISS, ben lontana dai moduli su cui stava lavorando. Questo perché il destino della copertura sarà quello di essere rilasciata nello spazio. Brucerà completamente dopo poche settimane, durante il suo rientro atmosferico.
Ritiro della strumentazione
Una volta finite le installazioni su Columbus, EV-1 e EV-2 risistemeranno tutta l’attrezzatura da riportare all’Airlock. Sempre sul Canadarm2 per EV-2, e ripercorrendo a ritroso il percorso sul fianco del moduli Columbus, Harmony e Destiny per EV-1.
Verranno lasciati gli strumenti fino ad ora usati, per poi ritirarne altri da utilizzare sugli elementi P5 e P6 del truss (la “spina dorsale” della ISS)


“Fiondati” verso P5 e P6
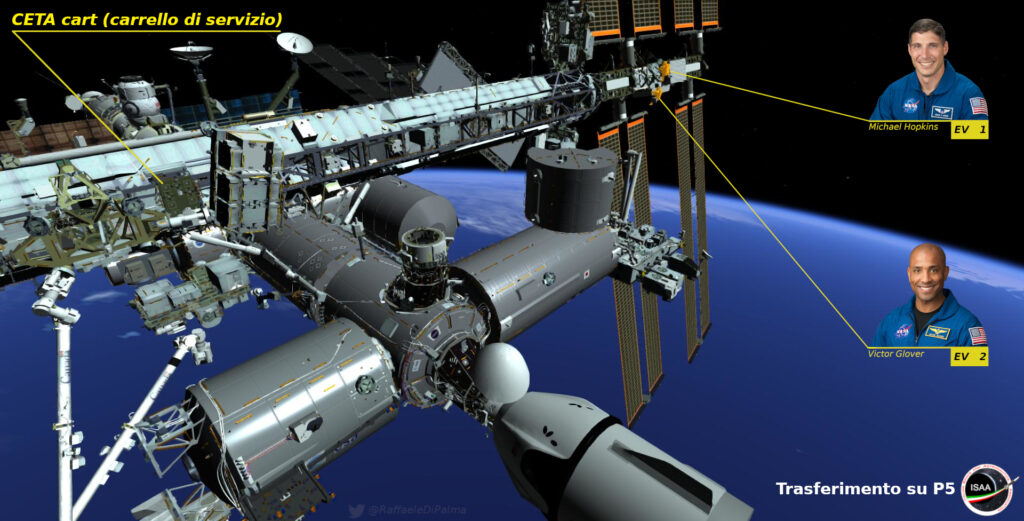
Gli elementi P5 e P6 del truss, si trovano (guardando verso la direzione di moto) all’estremo lato sinistro della ISS. Gli astronauti chiamano “Slingshot” (fionda) una tecnica che permette di estendere il raggio del cavo di sicurezza, lungo 25 metri.
Il primo ad avviarsi verso questa destinazione sarà EV-1. Prima però dovrà ritirare un PFR (portable foot restraint) situato su un “carrello di servizio” chiamato CETA (Crew Equipment and Translation Aid).
Seguito poi da EV-2, raggiungeranno come prima tappa l’elemento P5 per l’installazione del PFR ed altre strutture di supporto utili alla prossima EVA.
Ultima fermata
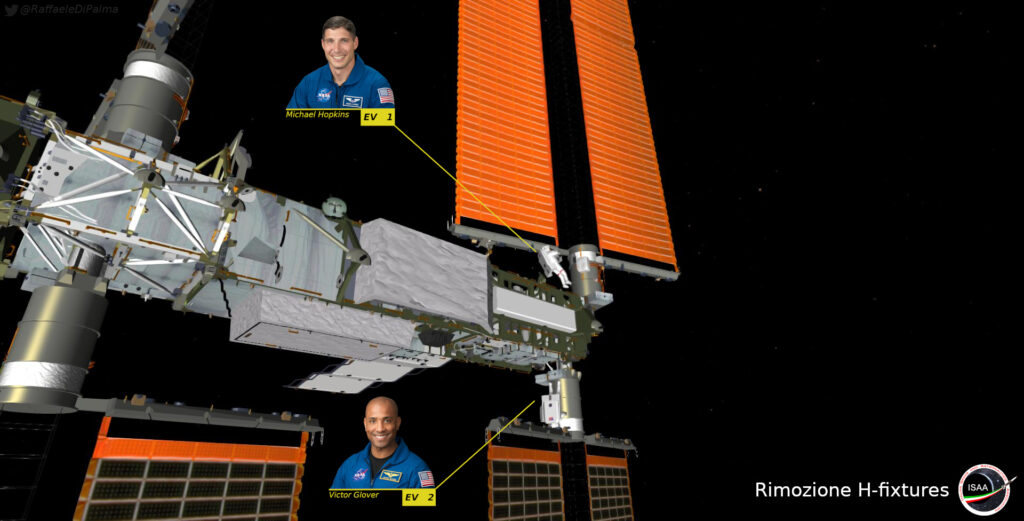
Lo spostamento poi verso P6 sarà breve e verranno rimosse contemporaneamente, due H-fixtures poste alla base dei pannelli solari.
Le H-Fixtures sono dei supporti che permettono la presa del braccio robotico DEXTRE (“la mano” del Canadarm2).

Entro metà febbraio verranno installati i nuovi pannelli fotovoltaici della ISS (gli iROSA) e le H-fixtures dovranno essere rimosse (verranno poi riportate a bordo) per far posto ai tralicci di supporto dei nuovi pannelli.
Finita quest’ultima incombenza, non rimarrà che rimettere ancora una volta gli attrezzi a posto e “rifiondarsi” verso l’airlock.
Rientro all’interno del modulo pressurizzato Quest
E con un rientro verso un meritato riposo, si concluderà la EVA-69.
Di solito la permanenza all’esterno della ISS è di circa 6 ore e mezzo ma, se Hopkins e Glover dovessero aver portato a termine i loro compiti principali prima del tempo previsto, potrebbero passare a delle operazioni “bonus” chiamate Get Ahead Tasks. Spesso si tratta di ulteriori preparazioni per agevolare le EVA successive.
La prossima (la numero 70) sarà sempre effettuata da Hopkins e Glover. Vi saranno manutenzioni alle batterie e sostituzioni di telecamere, ma ve ne parleremo nel prossimo articolo.
Vi lasciamo con una simulazione video dell’intera EVA-69 (consigliamo la visione di questa a velocità doppia) e con una ripresa durante le operazioni di addestramento nella piscina NBL (Neutral Buoyancy Laboratory).
 Questo articolo è © 2006-2026 dell'Associazione ISAA, ove non diversamente indicato. Vedi le condizioni di licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
Questo articolo è © 2006-2026 dell'Associazione ISAA, ove non diversamente indicato. Vedi le condizioni di licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
