






Il prossimo rover marziano NASA non ha ancora un nome ma avrà ben 23 occhi
Per documentare ogni fase della prossima missione robotica marziana, il cui lancio è previsto per l’estate 2020, la NASA ha annunciato che il Mars 2020 Rover avrà a bordo ben 23 tra video e fotocamere. Un significativo incremento rispetto ai rover gemelli Spirit ed Opportunity che ne hanno 10 ciascuno e Curiosity che ne ha 17.
“La tecnologia delle video e fotocamere è in continua evoluzione”, ha affermato Justin Maki del NASA Jet Propulsion Laboratory di Pasadena dove il rover è in fase di assemblaggio. “Ogni successiva missione sfrutta questa evoluzione, con risultati migliori e naturalmente un costo più basso.”
Per fare un esempio i tre già citati precedenti rovers, di cui solo Spirit non è più operativo, sono provvisti di camere per la navigazione (NavCams) e per evitare gli ostacoli (HazCams), con risoluzione pari ad 1 megapixel in bianco e nero, il Mars 2020 avrà a disposizione camere a colori con risoluzione di 20 megapixel.
Le 23 camere di bordo sono classificate in tre diverse categorie, in base all’utilizzo a cui sono dedicate:
Descent Imaging Cameras
7 camere che saranno attive durante le fasi di discesa atmosferica, riprenderanno a colori l’apertura dei paracadute e l’atterraggio controllato sulla superficie, a cui si aggiungerà un microfono per registrare i suoni.
Alcune camere sono installate anche sullo stadio di discesa, il famoso “sky crane”, e guarderanno verso il basso riprendendo il rover, che a sua volta avrà camere che riprenderanno lo “sky crane” in azione e camere che riprenderanno l’approssimarsi della superficie.

Fino ad ora non è mai stato possibile vedere come si comportano i paracadute mentre si dispiegano nella tenue atmosfera marziana, come oscilla il rover mentre viene calato dalla piattaforma o come si flettono i bracci delle sospensioni quando le 6 ruote toccano il suolo. I dati raccolti verranno utilizzati dagli ingegneri per la progettazione delle future missioni esplorative.
Tutte queste camere, assemblate partendo da hardware commerciale, sono classificate come necessarie ma non essenziali per l’atterraggio e per il proseguimento della missione.
Engineering Cameras
9 camere di nuova generazione che forniranno immagini a colori e più dettagliate del terreno su cui si muoverà il rover.
Le funzioni cui sono preposte vanno dalla misurazione del terreno per consentire agli operatori del JPL una migliore pianificazione dei percorsi da intraprendere, pianificazione dei movimenti del braccio robotico e dei vari utensili installati ed infine al supporto alle operazioni di scelta dei campioni da raccogliere.
Per la prima volta poi, grazie ai software di stabilizzazione, sarà possibile riprendere immagini con i rover in movimento.
Le Engineering Cameras a loro volta sono divise in tre sotto categorie:
– Hazard Avoidance Cameras (HazCams): 4 anteriori e 2 posteriori, serviranno ad individuare eventuali ostacoli sul percorso stabilito, quali rocce, solchi o dune di sabbia. Durante la marcia il rover si fermerà frequentemente per scattare immagini stereo del terreno, le immagini 3D risultanti verranno elaborate dal rover stesso che avrà la capacità di decidere autonomamente il percorso da seguire per arrivare ad un obbiettivo prestabilito.
– Navigation Cameras (NavCams): 4 installate a coppie sulla cosiddetta torretta. Scattano fotografie stereo ad alta risoluzione in bianco e nero, particolarmente utili durante gli spostamenti autonomi. Grazie alle NavCams il software di bordo sarà in grado di individuare e riconoscere oggetti grandi quanto una palla da golf da una distanza di 25 metri.
A differenza delle NavCams dei rover precedenti, che univano diverse foto per avere una più ampia apertura visiva, queste di nuova generazione otterranno lo stesso risultato in un solo scatto senza distorsioni dovute alle lenti.
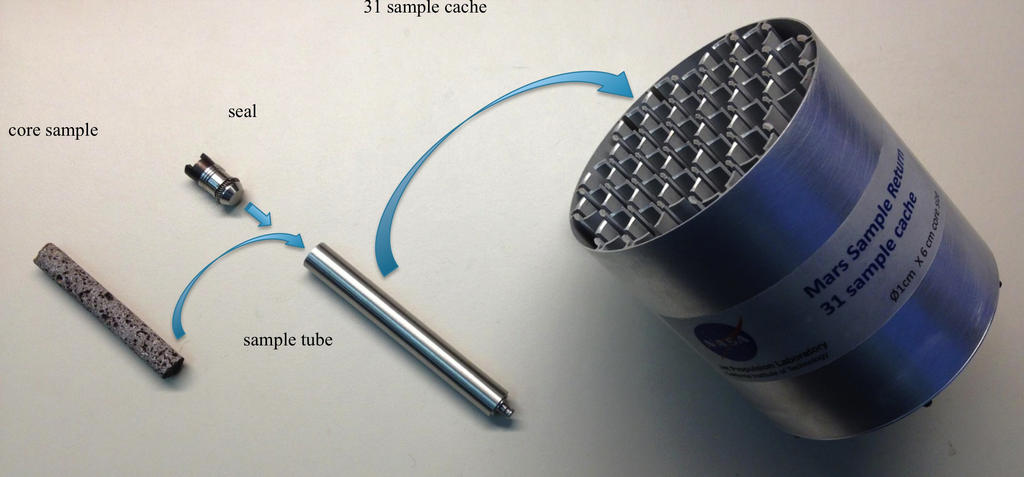
– CacheCam: Singola camera ad alta risoluzione che guarda verso il basso nel contenitore cilindrico dei campioni raccolti. Una delle novità del Mars 2020 Rover sarà di avere questo speciale contenitore che, una volta riempito e sigillato con 31 diverse carote di suolo, potrà essere recuperato da una futura missione per il ritorno verso la Terra. In quest’ottica la CacheCam catturerà immagini microscopiche della parte superiore di ciascun campione e la chiusura e stoccaggio di ciascun cilindro contenitore.
Science Cameras
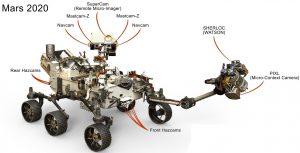
7 camere posizionate sulla torretta e sul braccio robotico, adibite principalmente a scopi scientifici quali l’analisi della composizione chimico fisica del suolo.
– Mastcam-Z: Coppia di camere posizionate sulla torretta in grado di riprendere immagini tridimensionali e video, fornendo una visione simile a quello che gli occhi umani vedrebbero, anzi meglio perché dotate di zoom.
– SuperCam: Il grande occhio singolo sulla torretta è in grado di sparare impulsi laser ad aree millimetriche fino ad una distanza di 7 metri. Il laser colpendo la roccia, genera gas plasma ricco di ioni ed elettroni il cui spettro viene registrato ed analizzato da uno spettrometro che ne rileva i componenti chimici. In particolare la ricerca si concentrerà su eventuali composti organici associabili alla presenza della vita in epoche passate.
– PIXL (Planetary Instrument for X-Ray Lithochemistry): È uno spettrometro a fluorescenza X, posizionato sul braccio robotico, associato ad una micro camera ad alta risoluzione che caturerà immagini dettagliate a ciascuna zona di analisi grande come un granello di sale.
– SHERLOC (Scanning Habitable Environments with Raman & Luminescence for Organics and Chemicals): Anch’esso posizionato sul braccio, si compone di uno spettrometro, un raggio laser ed una microcamera. Come per il SuperCam, lo spettrometro registrerà, analizzerà e rileverà i composti liberati nella zona colpita dal laser che verrà inoltre fotografata dalla microcamera. Anche per questo strumento la ricerca si concentrerà sui composti organici.
– WATSON: Ulteriore camera posizionata sul braccio il cui scopo, e lo si intuisce già dal nome, sarà di lavorare con SHERLOC, riprendendo immagini più ampie delle zone analizzate per poter avere un’impressione del contesto generale in cui si trovano. Essendo l’unica camera non per riprese microscopiche presente sul braccio mobile, verrà utilizzata anche per effettuare i controlli dell’hardware esterno del rover (ruote, sospensioni, altre camere ecc.) e soprattutto il controllo dello strato di polvere e sabbia che si deposita regolarmente sulle superfici e strumenti.
Naturalmente, con una tale dotazione di camere ad alta risoluzione, il fattore limitante della missione sarà l’invio di una grande mole di dati verso Terra.
Per risolvere questo problema i tecnici hanno dovuto lavorare sulla compressione delle immagini, migliorando ulteriormente le prestazioni raggiunte con Curiosity, in cui la compressione viene svolta da ciascuna camera. Su Spirit ed Opportunity, era il computer principale che effettuava tutto il lavoro prima dell’invio a Terra.
Sarà anche di grande importanza l’utilizzo ottimale del network di telecomunicazioni fornito dalle sonde in orbita al pianeta, il Mars Reconnaissance Orbiter, MAVEN e il Trace Gas Orbiter europeo.
Fonte e foto credit, NASA.
 Questo articolo è copyright dell'Associazione ISAA 2006-2026, ove non diversamente indicato. - Consulta la licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
Questo articolo è copyright dell'Associazione ISAA 2006-2026, ove non diversamente indicato. - Consulta la licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.

{kind=link}
si ragazzi benissimo i 23 occhi ma la ricerca vera non è nell’aggiungere occhi(che pure sono utili) ma nel creare una machina che possa prendere decisioni autonome , sia capace di autogestirsi da sola. E se si vuole si fa!Finche’ non capiranno che per quanto sei competente e bravo non puoi prevedere tutti gli eventuali imprevisti mesi prima e la strada non è questa l esplorazione dello spazio fara’ sempre passetti di formica. Inoltre dovrebbero utilizzre energia nucleare in modo che possono fare una attivita esplorativa su lungo periodo(economicamente non ha senso spendere decine di milioni di euro per mandarlo a meta e poi lasciarlo li’ poco tempo). La ricerca spaziale sembra quasi godere di luce (e forse soldi?) per procedere con criteri e strategie incomprensibili. Io avrei messo per esempio un drone intelligente che esplora il territorio, avrei fornito il rover di guida automatica e avrei studiato com sviluppare altri tipo di agenti intelligenti che possano interagire con il terrirorio in modo differente e magari piu’ invasivo. Poi c’e’ il problema dei sistemi di propulsione. Pensare di colonizzare marte con i sistemi propulsivi tradizionali non ha senso e rischia di diventare un boomerang per intera ricerca spaziale. Alla prima morte di massa si bloccherebbe tutto per anni e anni. Dovete investire su sistemi di propulsione alternativa altrimento sara’ un fallimento scontato (sara’ gia’ tanto se riuscirete ad atterrare su marte con un umano a bordo vivo). I governi devono smetterala di tenere le ricerche di fisica applicata piu’ promettenti dentro i cassetti per fini militari e far finta di far progredire la ricerca spaziale. Devono tirar fuori quello che hanno per il bene dell’umanita’. Perche’ per esempio EMDrive, che possedevano in casa da decenni, è sempre stato sottovalutato dalla Nasa quando ora la Cina ci sta investendo molto facendo dei test avanzati nello spazio? Non vorrete mica raccontarmi che sia una svista quella americana. La realta’ è che la supremazia spaziale e tecnologica americana ha fatto si’ che avessero interesse a tenersi nascoste le migliori tecnologie perche’ tanto non c’era nessun altro concorrente a quei livelli. Di tutti i mali che ha portato la globalizzazione forse una cosa positiva la portata: i primati economici e spaziali stanno sfumando inesorabilmente verso altre nazioni (quali cina, india) e spero questo costringa tutti a mostrare le carte nel tavolo.