






ESA inizia a pianificare una missione robotica in una caverna lunare

Gli skylight (lucernari) presenti sulla superficie lunare sono punti di accesso ai tunnel di lava sotterranei: enormi caverne tutte da esplorare e in cui poter realizzare i futuri insediamenti umani.
I tunnel di lava, presenti anche sulla Terra e su Marte, si formarono nei “mari” basaltici quando la Luna era ancora vulcanicamente attiva. La lava, raffreddandosi più velocemente all’esterno, ha formato veri e propri condotti al cui interno scorreva il magma fuso che per gravità ha infine vuotato il tunnel.
La scoperta dei tunnel di lava avvenne grazie agli skylight, aperture circolari sulla superficie causate dal crollo della volta della caverna.
Data la ridotta gravità lunare (un sesto di quella terrestre) teoricamente i tunnel potrebbero avere un’ampiezza di 2 chilometri, 600 metri di altezza con una copertura della volta di soli 20 metri di spessore.
Nell’agosto 2019 l’agenzia spaziale europea indisse un bando per raccogliere proposte concrete per l’esplorazione delle cavità del sottosuolo lunare. Le proposte dovevano rispettare uno o più dei seguenti requisiti:
- il sistema di rilevazione della sonda, avvicinandosi allo skylight, dovrà essere in grado di identificare l’apertura nella superficie, di dimensioni comprese tra 100 e 1.000 metri e profondità compresa tra 30 e 150 metri;
- la sonda, o comunque una parte di essa, dovrà essere in grado di accedere allo skylight, tenendo conto dell’instabilità del bordo, fino ad almeno 50 metri di profondità, scendendo lungo una parete verticale o addirittura a strapiombo;
- raggiunto il fondo la sonda dovrà essere in grado di spostarsi per almeno 200 metri nella caverna, evitando eventuali ostacoli e acquisendo una mappatura precisa dell’ambiente;
- la sonda infine dovrà essere in grado di comunicare con la controparte di superficie e da essa ricevere l’energia.
La sonda robotica sarà trasportata sulla Luna, in prossimità dello skylight MHh, tramite il lander European Large Logistics Lander (EL3), lanciato da un Ariane 6 (nella versione con quattro booster) e dovrà quindi soddisfare tutti i parametri di dimensione e peso. La durata della missione, essendo alimentata dall’energia solare, dovrà essere di un giorno lunare (14 giorni terrestri).

Ben 34 proposte vennero presentate, di cui 22 erano conformi ai requisiti necessari. Nei mesi successivi, dopo un’accurata selezione, a 8 team venne chiesto di presentare lo studio completo e approfondito e nell’aprile 2020 vennero comunicati i 5 team che sarebbero passati alla fase di sviluppo successiva, finanziata da ESA.
Grazie alle proposte di questi cinque “semifinalisti”, ESA è stata in grado di pianificare con maggior precisione l’ipotetica missione, suddividendola in tre fasi o scenari:
- avvicinamento e rilevazione del bordo dello skylight;
- discesa di una sonda nel cratere per acquisire dati;
- raggiungimento del fondo del cratere, esplorazione, mappatura e conduzione di esperimenti scientifici.
Infine lo scorso 24 febbraio, i team dell’Università di Würzburg e dell’Università di Oviedo sono stati selezionati per partecipare a sessioni di studio, discussione e progettazione multidisciplinare, chiamate Concurrent Design Facility (CDF), a cui partecipano rappresentanti di tutti i settori coinvolti in una missione, compreso il lancio e l’atterraggio sulla superficie.
Abbiamo interpellato Loredana Bessone, Technical Officer per questo studio e Project Manager dei programi ESA CAVES e PANGAEA.
«Solitamente, tra tutte le proposte, solo una viene selezionata per proseguire con uno studio CDF. Questa volta ne abbiamo scelti due, complementari e non in concorrenza tra loro. Siamo ancora ben lontani da una missione, ma i due team selezionati ci permetteranno di avere uno studio di fattibilità per una missione con alto valore scientifico ed entrambi propongono tecnologie interessanti da studiare per avvicinarsi a soluzioni fattibili».
DAEDALUS
Il Descent And Exploration in Deep Autonomy of Lava Underground Structures, sviluppato da un consorzio guidato dall’Istituto di Informatica dell’Università di Würzburg, è una sfera delle dimensioni di un pallone studiata per investigare l’ambiente circostante tramite un sistema Lidar 3D e una camera stereografica. Inizialmente calata nello skylight tramite un cavo di 50 metri che fornisce anche l’energia e funge da antenna Wi-Fi, la sonda sarà in grado di staccarsi dal cavo e muoversi autonomamente, comunicando con la superficie attraverso una rete Wi-Fi.
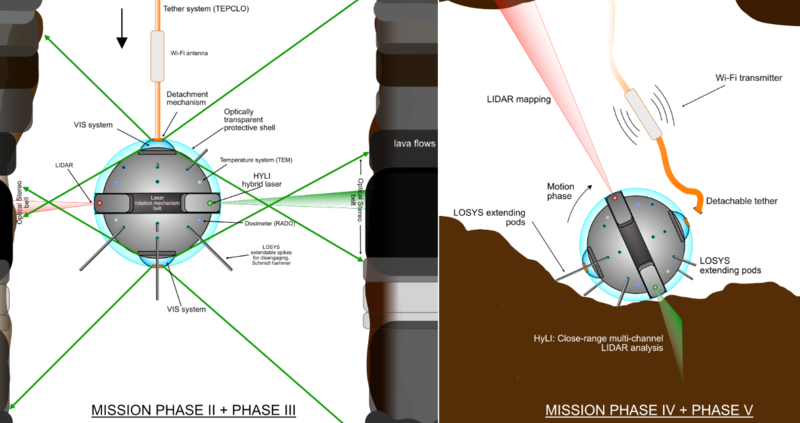
Partendo da un primo modello di soli 10 centimetri di diametro, attualmente lo sviluppo della sonda è arrivato al terzo modello, mentre tutti i sottosistemi di quello definitivo, ancora allo stato progettuale e già sottoposto a ESA, sono stati testati separatamente.
La gru robotica
Sviluppata da un corsorzio guidato dall’Università di Oviedo, il Robotic crane for wireless power and data transmission between surface and cave è un rover di 3,2 × 1,8 metri (in configurazione di lancio) in grado di dispiegarsi diventando una gru dotata di piattaforma girevole, braccio telescopico, stabilizzatori, moduli fotovoltaici e naturalmente il payload da calare nello skylight.
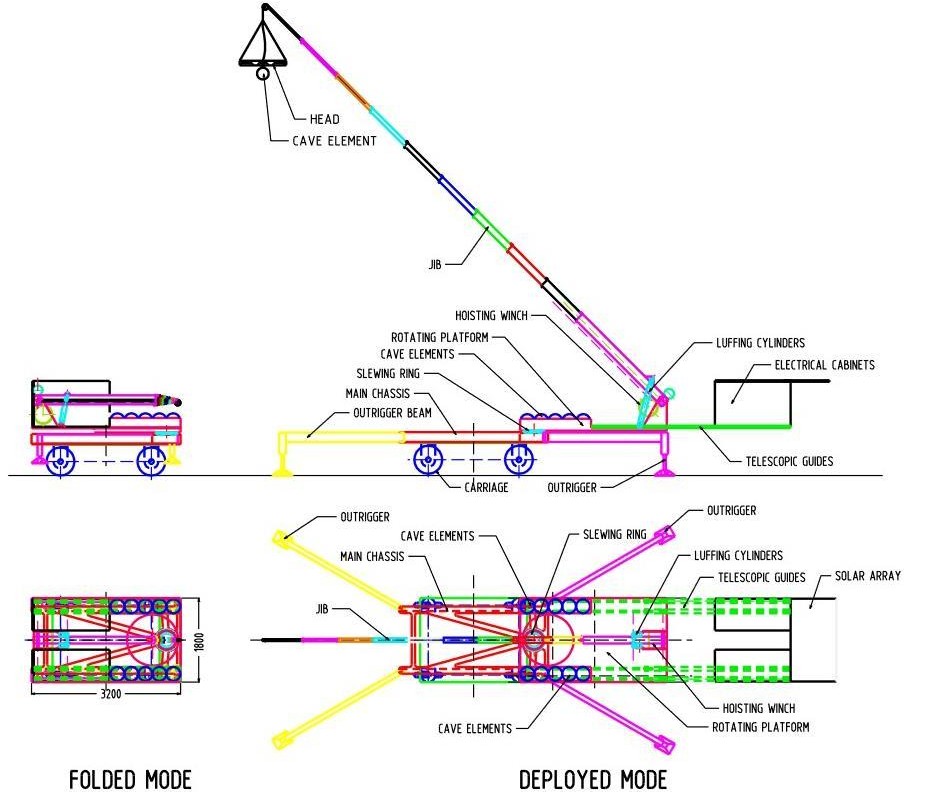
Una volta raggiunto il bordo del cratere e dispiegatasi in configurazione di lavoro, la gru calerà nello skylight diverse sonde alimentate tramite una testa di ricarica wireless posta sul cavo della gru e collegate a una rete dati gestita dalla gru stessa. Attualmente il team sta valutando tre opzioni per quanto riguarda il braccio: telescopico, pantografo o caterpillar, tenendo in considerazione la lunghezza massima di estensione, la capacità di carico e l’ingombro quando ripiegato.
Questi due progetti congiunti aiuteranno ESA a identificare nuove tecnologie e sviluppare un percorso di fattibilità per le future missioni di esplorazione, comprese quelle umane. Infatti le ampie cavità del sottosuolo lunare, offrendo un sicuro riparo dalle radiazioni e dagli impatti micrometeorici, con la loro temperatura costante, con eventuale presenza di acqua ghiacciata e altre risorse, sarebbero un sito ideale per la realizzazione di un insediamento abitato.
Abbiamo chiesto a Francesco Sauro, speleologo, professore all’Università di Bologna e Direttore tecnico dei corsi ESA CAVES e PANGAEA per astronauti, se fosse davvero sicuro realizzare un insediamento in un tunnel di lava, dato che ogni tanto la volta crolla come nel caso degli skylight, e quante missioni esplorative sarebbero necessarie per confermarne la sicurezza.
«Prima di tutto ci vogliono delle missioni che possano esplorare e caratterizzare quegli ambienti sotterranei. Inizialmente saranno robotiche, seguite da quelle umane di breve durata. Poi ci vogliono le tecnologie per costruire una base all’interno del tunnel, quindi direi almeno una decina di missioni prima di poter davvero costruire una base planetaria».
Fonte: ESA
 Questo articolo è copyright dell'Associazione ISAA 2006-2026, ove non diversamente indicato. - Consulta la licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
Questo articolo è copyright dell'Associazione ISAA 2006-2026, ove non diversamente indicato. - Consulta la licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
