






Il rover lunare VIPER avrà la sua fanaliera
Durante il suo incedere nelle zone più buie e fredde del Sistema solare, il rover lunare VIPER della NASA necessiterà di un buon sistema di illuminazione del suo percorso alla ricerca di acqua.
Navigare al buio
L’ambiente lunare ha caratteristiche di illuminazione molto particolari; l’assenza di atmosfera, le proprietà riflettenti della regolite e la presenza di massi, crateri, avvallamenti, colline ecc., possono creare parecchi problemi alla navigazione visiva e allo studio dei percorsi per i rover. I massi possono proiettare ombre il cui buio pressoché totale può nascondere insidie, mentre la regolite più chiara può riflettere la luce solare al punto da accecare l’osservatore rendendo difficoltosa la guida. Purtroppo sulla Luna non esiste la penombra, quindi il contrasto fra le zone illuminate e quelle buie rende estremamente difficoltoso pianificare un percorso ed effettuare osservazioni visive. Per ovviare a ciò, i piloti del rover VIPER potranno fare affidamento su di un sistema di veri e propri fanali e videocamere che permetteranno loro di riuscire a evitare i massi e gli ostacoli, di scendere lungo le pendenze di un cratere e di allontanarsi da zone potenzialmente pericolose per la missione. Per assicurarsi che la prima fanaliera mai montata su di un rover spaziale possa essere efficace per evitare gli ostacoli nascosti dalle ombre lunari, il team di VIPER ha recentemente testato dei prototipi di lampade in una fedele ricostruzione di un paesaggio selenico situato presso l’Ames Research Center della NASA, nella Silicon Valley, in California, dove l’intera missione viene progettata.
Dopo aver superato in agosto la Preliminary Design Review condotta dalla Planetary Science Division della NASA e da un team indipendente di ispettori, la missione VIPER beneficerà di questo tipo di test per risolvere le sfide che dovrà affrontare sul nostro satellite naturale.
La scelta giusta
«Affrontiamo delle sfide simili a quelle che incontra un progettista di automobili» ha spiegato Uland Wong, scienziato informatico e responsabile dell’hardware di navigazione presso l’Ames Center. «Che sia su un rover lunare oppure su un’utilitaria, un pessimo sistema di illuminazione impedirà al pilota di vedere il paesaggio che lo circonda. Dobbiamo prestare grande attenzione a queste sfide, perché una volta che VIPER sarà sulla Luna non potrà più tornare indietro per essere modificato».
Non è di certo la prima volta che gli ingegneri lavorano su sistemi di illuminazione da utilizzare nello spazio; i LED presenti nei microscopi dei rover marziani e le luci che aiutano le astronavi durante le manovre di ormeggio con la Stazione Spaziale Internazionale ne sono un valido esempio. Tuttavia le severe condizioni ambientali che caratterizzano l’ambiente lunare, combinate con gli specifici obiettivi di missione di VIPER, volti alla ricerca di acqua in luoghi profondi e scarsamente illuminati, rendono questo rover il primo ad avere la necessità di disporre di una vera e propria fanaliera simile a quella delle automobili. Mentre gli obiettivi scientifici su Marte permettono solitamente ai rover di operare alla luce del Sole, VIPER si avventurerà in luoghi bui che non ricevono mai la luce solare a causa dell’inclinazione della Luna e della conseguente bassa angolazione del Sole al Polo Sud.
Le luci di VIPER, costituite da LED, saranno in grado di offrire la stessa flessibilità di quelle nostre automobili. Montate su un albero, due di queste fanaliere proietteranno un raggio ristretto a lunga distanza, mentre attorno alla base del rover, fino a sei luci illumineranno una vasta area in modo meno intenso, e potranno venire accese e spente secondo necessità.
I test
Nel corso della recente campagna di test svoltasi all’Ames, il team ha provato diverse soluzioni LED per osservare quali di esse offrivano la migliore performance ottica e quale fosse il miglior modo di posizionarle in modo tale da gestire il fenomeno del backscattering, ovvero della riflessione della luce dalle zone illuminate. Quello del backscattering è un problema molto particolare sulla Luna, perché la sua superficie è ricoperta da polvere che riflette parecchia luce che potrebbe accecare le telecamere di VIPER.

«Stiamo sviluppando il sistema di illuminazione con una tecnica iterativa» ha illustrato Wong. «Iniziamo con alcuni candidati e tentiamo di comprenderne le performance tramite i test, quindi scegliamo quelli che reputiamo i migliori».
I diversi sistemi di illuminazione candidati sono stati montati su dei treppiedi e sono stati piazzati a turno in un ambiente in cui è stato simulato il suolo lunare. Di seguito gli ingegneri hanno illuminato questo terreno come apparirebbe in diverse aree ai poli della Luna, quindi con un angolo molto basso di illuminazione, simulando delle zone illuminate dal Sole e delle zone nell’oscurità totale. Poi sono stati attivati i sistemi di illuminazione e sono state scattate delle foto, proprio come un giorno farà VIPER. Ora è in corso la valutazione delle immagini.
I tecnici dell’Ames Center passeranno le loro osservazioni ai colleghi del progetto VIPER del Johnson Space Center della NASA di Houston, i quali avranno il compito di costruire il sistema di fanali. Infine, congiuntamente, essi sceglieranno i due migliori candidati, e quello che supererà al meglio i rigorosi test per la qualifica al volo spaziale si guadagnerà il titolo di primo sistema di fanali ideato per un rover della NASA.

La missione VIPER in breve
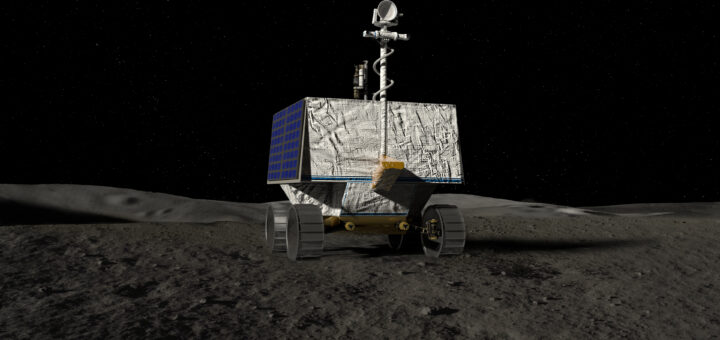
Il rover lunare della NASA, Volatiles Investigating Polar Exploration Rover, o VIPER, esplorerà l’ambiente estremo della nostra Luna alla ricerca di ghiaccio d’acqua e altre potenziali risorse. Il robot semovente atterrerà al Polo Sud verso la fine del 2023 per una missione della durata nominale di 100 giorni. Le importanti informazioni che riuscirà a raccogliere ci aiuteranno a comprendere l’origine e la distribuzione dell’acqua sulla Luna e a determinare in che modo attingere dalle risorse lunari per le missioni future di esplorazione dello spazio.
Durante i suoi 100 giorni di missione si prevede che il rover debba percorrere circa 20 km sul suolo selenico viaggiando a una velocità massima di 0,8 km/h. Esso misurerà 1,5 × 1,5 × 2,5 m e peserà 430 kg. Sarà dotato di 3 spettrometri e di una trivella di 1 m e sarà alimentato da pannelli solari e batterie con un picco di potenza di 450 W. Le comunicazioni in banda X saranno dirette Terra-Luna tramite il Deep Space Network.
L’esplorazione
VIPER sarà in grado di analizzare direttamente il ghiaccio d’acqua sia sulla superficie lunare sia sotto di essa, al variare di profondità e temperatura. I dati trasmessi a Terra saranno utili per la stesura di mappe delle risorse lunari che aiuteranno gli scienziati a determinare la posizione e la concentrazione del ghiaccio d’acqua e delle forme in cui esso è presente, se sotto forma di cristalli o di molecole chimicamente legate ad altri materiali. Nell’ambito del programma Artemis e per i futuri programmi di esplorazione, avere a disposizione risorse “in situ”, come l’acqua sulla Luna, sarebbe di enorme aiuto.
Le sfide di VIPER
Il team di VIPER ha dovuto superare degli ostacoli del tutto nuovi nel progettare la missione, rispetto ai team delle missioni marziane. Per fronteggiare le estreme variazioni di temperatura il rover sarà dotato di particolari sistemi di controllo termico per evitare che le sue parti possano congelarsi o surriscaldarsi.
La gestione del veicolo sarà in tempo reale, ovvero il rover verrà guidato in maniera interattiva, e perciò sarà di fondamentale importanza l’abilità dei piloti al fine della buona riuscita della missione. Purtroppo non sono disponibili moltissime immagini orbitali dei poli lunari per aiutare la pianificazione dei percorsi.
Non ci sono molte certezze sulle caratteristiche fisiche del suolo lunare al Polo Sud. Il terreno è sabbioso e soffice? Compatto? Scivoloso? Per affrontare questi dubbi VIPER è progettato per essere agile. Esso può muoversi lateralmente o diagonalmente, può ruotare in circolo e muoversi in qualsiasi direzione senza bisogno di cambiare il suo orientamento. Nel caso in cui dovesse incontrare del suolo cedevole potrà “camminare” muovendo ciascuna ruota in maniera indipendente, per potersi spostare.
© NASA / Alcyon Technical Services / James Zunt
VIPER dovrà muoversi sul suolo lunare facendo molta attenzione alle mutevoli zone d’ombra e al contempo mantenendo le comunicazioni con la Terra durante la sua esplorazione. I periodi di oscurità potranno durare anche una settimana, quindi il rover verrà parcheggiato in zone specifiche, in quota, dove il buio durerà al massimo quattro giorni. La pianificazione della sua rotta, tenendo conto di tutti questi fattori, sarà molto complicata.
In viaggio con i CLPS
Il rover VIPER verrà inviato sulla Luna nell’ambito dell’iniziativa Commercial Lunar Payload Services (CLPS). Il fornitore commerciale selezionato è Astrobotic e sarà responsabile dell’integrazione di VIPER nel suo lander, del sistema e delle operazioni di lancio e di quelle legate all’allunaggio. Il viaggio di VIPER sarà soggetto a una finestra di lancio critica, in quanto l’allunaggio dovrà avvenire all’inizio della “stagione estiva” del Polo Sud, quando i periodi di illuminazione solare sono più lunghi.
VIPER fa parte del Lunar Discovery and Exploration Program ed è gestito dalla Planetary Science Division del Science Mission Directorate del quartier generale della NASA di Washington. L’Ames Research Center ha in carico la responsabilità del progetto, dei suoi aspetti scientifici, dell’ingegneria dei sistemi, delle operazioni di superficie del rover in tempo reale e del software di volo. L’hardware del rover è progettato e costruito dal Johnson Space Center di Houston, mentre la strumentazione è fornita dall’Ames, dal Kennedy Space Center in Florida e dal partner commerciale Honeybee Robotics di Altadena, California.
Fonte: NASA
 Questo articolo è © 2006-2026 dell'Associazione ISAA, ove non diversamente indicato. Vedi le condizioni di licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
Questo articolo è © 2006-2026 dell'Associazione ISAA, ove non diversamente indicato. Vedi le condizioni di licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.

Molto interessante la soluzione del problema illuminazione in ambienti senza una pur minima diffusione della luce
Il difetto di questi articoli è la lunghezza . Dovreste spezzarli in piu’ pubblicazioni
Comunque bravi e chiari