






InSight: tecnici al lavoro per risolvere i problemi della “talpa”
Sono passati più di sette mesi dal fortunato atterraggio di InSight sul suolo marziano, quasi un terzo della durata prevista per la missione di NASA incaricata di indagare il sottosuolo del Pianeta Rosso, e ancora uno dei suoi principali strumenti scientifici, la sonda termica HP3 (Heat Flow and Physical Properties Probe) non è operativo. Il penetratore, noto anche come “la talpa”, indugia ancora a circa 20/30 cm di profondità, ben lontano dai cinque metri che avrebbe dovuto raggiungere.
Sulla Terra, però, tecnici e ingegneri del Jet Propulsion Laboratory, responsabile della missione, e dell’agenzia spaziale tedesca DLR, che ha costruito lo strumento, sono ben lontani dal darsi per vinti e continuano a esercitarsi in un delicato troubleshooting a 386 milioni di km dal problema.
Lo strumento HP3
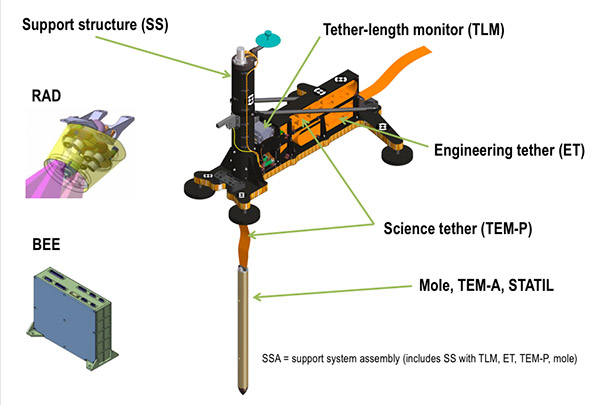
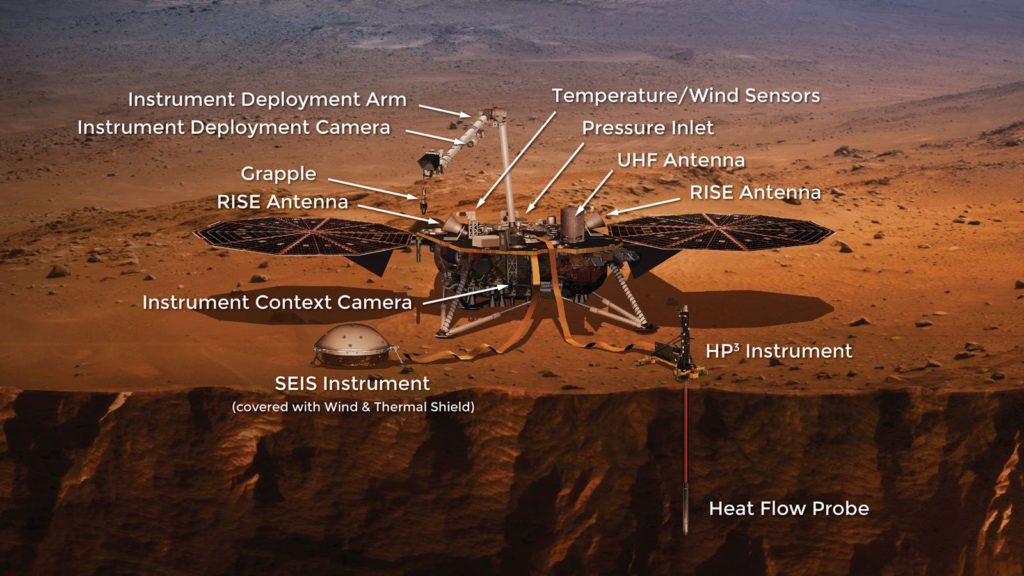
Il braccio robotico di InSight ha posizionato HP3 sul terreno antistante il lander lo scorso 12 febbraio. Lo strumento comprende un supporto (Support System Assembly, SSA) con quattro piedi e un cilindro che ospitava la sonda-penetratore, che misura 40 cm in lunghezza e 2,7 in diametro e ha al suo interno un meccanismo a molla in grado di martellare il terreno come mostra questo video.
La talpa, dotata sensore di conduttività termica (Thermal Excitation and Measurement-Active, TEM-A) è collegata ad un “cavo”, inizialmente alloggiato all’interno della struttura. Il science tether non solo permette di trasferire i dati rilevati, ma esso stesso li raccoglie, scendendo nel terreno dietro il penetratore, attraverso i suoi 14 misuratori di temperatura posti a circa 35 cm di distanza l’uno dall’altro (Thermal Excitation and Measurement-Passive, TEM-P). Un altro cavo, detto “ingegneristico”, connette la struttura al lander ove, in un compartimento riscaldato, è ospitata l’elettronica che controlla lo strumento (BEE). Sempre sul lander è installato un radiometro (RAD).
Secondo i piani, la penetrazione nel suolo di Marte fino a cinque metri sarebbe dovuta avvenire in dieci tappe, in un periodo di almeno 40 sol (o giorni marziani), per consentire di effettuare misurazioni della conduttività termica a vari livelli di profondità. La sonda avrebbe scavato per quattro ore, procedendo per circa 50 cm, atteso nei due sol successivi la dissipazione del calore prodotto dall’attrito e poi utilizzato il quarto sol per effettuare le misurazioni.
In realtà sin dall’inizio delle operazioni, il 1º marzo, si è verificata una situazione anomala: la sonda, già dopo i primi minuti di scavo ha cessato di scendere nel terreno e si è inclinata sensibilmente, di circa 15°, producendo un sensibile spostamento della struttura di supporto. Successivi tentativi di penetrazione, sempre della durata di 4 ore ciascuno, non hanno prodotto alcun risultato.
Diagnosi dell’anomalia
A questo punto i responsabili della missione hanno deciso di sospendere il movimento della talpa (il numero di “colpi” per i quali il dispositivo è garantito funzionare sono limitati e quindi non vanno sprecati) e di analizzare la situazione quanto più accuratamente fosse possibile. Nel corso di oltre un mese, attraverso l’esame dei dati trasmessi dai sensori, delle riprese delle due camere di cui InSight è dotata e dei dati registrati dal vicino sismometro, si è arrivati a escludere qualsiasi avaria del penetratore e a delineare tre possibili spiegazioni dell’anomalia.
La prima ipotesi, che da subito i tecnici hanno giudicato poco probabile e che poi i fatti hanno smentito, per cui possiamo parlarne al passato, riguardava la possibilità che il penetratore o il cavo fossero rimasti bloccati entro la struttura di supporto.
Non si può invece ancora escludere che la sonda abbia incontrato una pietra o uno strato roccioso che non è in grado di penetrare. A noi profani sembrerebbe l’eventualità più probabile, ma gli esperti tendono a ritenerla abbastanza remota e non solo per la scaramanzia con cui si cerca allontanare una situazione che non permetterebbe alcun intervento risolutore da terra.
Bisogna anzitutto considerare che HP3 non è del tutto disarmato di fronte agli ostacoli. Le simulazioni svolte a terra hanno mostrato che il penetratore è in grado di spostare non solo la ghiaia, ma anche rocce di piccole dimensioni (fino a 5–10 cm di larghezza) e che riesce ad aggirare quelle più grandi inclinandosi, per poi recuperare la traiettoria di discesa verticale (lo spostamento della struttura era stato inizialmente spiegato in questo modo). In secondo luogo il terreno di atterraggio di InSight a Elysium Planitia è stato scelto proprio per le caratteristiche geomorfologiche, che escludono la presenza di blocchi rocciosi, anche sotto la superficie.
Lo scenario più probabile, quindi, è che la talpa non riesca a procedere perché il suolo presenta delle caratteristiche diverse da quelle previste, che ostacolano la penetrazione. Per poter scavare in profondità, infatti, la sonda ha bisogno dell’attrito del terreno. Occorre, cioè, che a ogni colpo la materia circostante aderisca al penetratore, frenandone il rinculo. Per usare un efficace paragone proposto da Emily Lakdawalla, bisogna che il terreno si comporti come sabbia, che collasserebbe riempendo il buco scavato dalla talpa, e non come neve, che compressa tenderebbe a compattarsi, formando attorno al penetratore un’ampia cavità con parenti solide. In una simile situazione la sonda si limiterebbe a rimbalzare, senza possibilità di avanzare in profondità.
«In altre missioni su Marte» scriveva l’11 aprile Tilman Spohn, Instrument Lead di HP3 nel blog dedicato alla missione InSight «i geologi hanno osservato che la sabbia di Marte non è coesiva […] ma hanno anche notato che lo strato superiore del terreno è formato da ciò che viene chiamato duricrust. Qui, le reazioni chimiche tra i granelli di sabbia li hanno fatti aderire, fornendo coesione. Il duricrust è solitamente sottile e non dovrebbe costituire un problema. Tuttavia sembra che presso sito di atterraggio di InSight abbia uno spessore di circa 20 centimetri! Se la talpa si trova nel duricrust, la sua superficie potrebbe benissimo aver perso attrito e nel tempo, potrebbe aver allargato il foro, come suggerito dai dati del nostro accelerometro e dai nostri dati termici.»
In soccorso della talpa
Ma in tali circostanze in che modo si può aiutare la talpa a recuperare l’attrito e riprendere la penetrazione? L’idea di utilizzare il braccio robotico per intervenire sul terreno si è profilata quasi subito alle menti dei tecnici del JPL e di DLR, tuttavia elaborare una strategia di intervento e testarla a Terra (ricordiamo che a Pasadena, esiste una copia di InSight, collocata sua una simulata superficie marziana, sulla quale vengono provate le operazioni e i relativi comandi, prima di essere eseguiti sul Pianeta Rosso) ha richiesto due mesi.
Il braccio robotico di InSight oltre a un manipolatore (una sorta di “mano”) con cui ha afferrato e deposto gli strumenti, dispone di una pala con cui avrebbe potuto rimuovere o spostare pietre o altri ostacoli sulla superficie di Marte, nel caso avessero impedito di collocare adeguatamente il sismometro e HP3. L’attrezzo, finora inutilizzato, sarà impiegato per esercitare una pressione sul duricrust in prossimità del penetratore, in modo da produrre l’aderenza del terreno necessaria allo scavo.

Per poter svolgere questa funzione nel modo più efficace, però, la benna dovrà premere quanto più possibile vicino alla talpa. Di qui l’esigenza di rimuovere la struttura di supporto che occupava proprio quell’area, operazione estremamente rischiosa, dal momento che tale struttura è attraversata dal “cavo scientifico”: una mossa sbagliata avrebbe potuto portare all’involontaria estrazione della talpa, con la conseguente totale compromissione dell’esperimento HP3. Né la sonda termica né il cavo, infatti, possono essere direttamente afferrati dalla “mano” del braccio robotico che può agganciare solo gli appigli appositamente predisposti allo scopo.
Proprio per evitare di peggiorare la situazione, lo spostamento della struttura di supporto è stato pianificato in varie tappe, intervallate da opportuni rilievi e verifiche. L’operazione è iniziata il 9 giugno, quando il manipolatore del braccio robotico ha afferrato la “maniglia” posta sulla sommità di HP3.
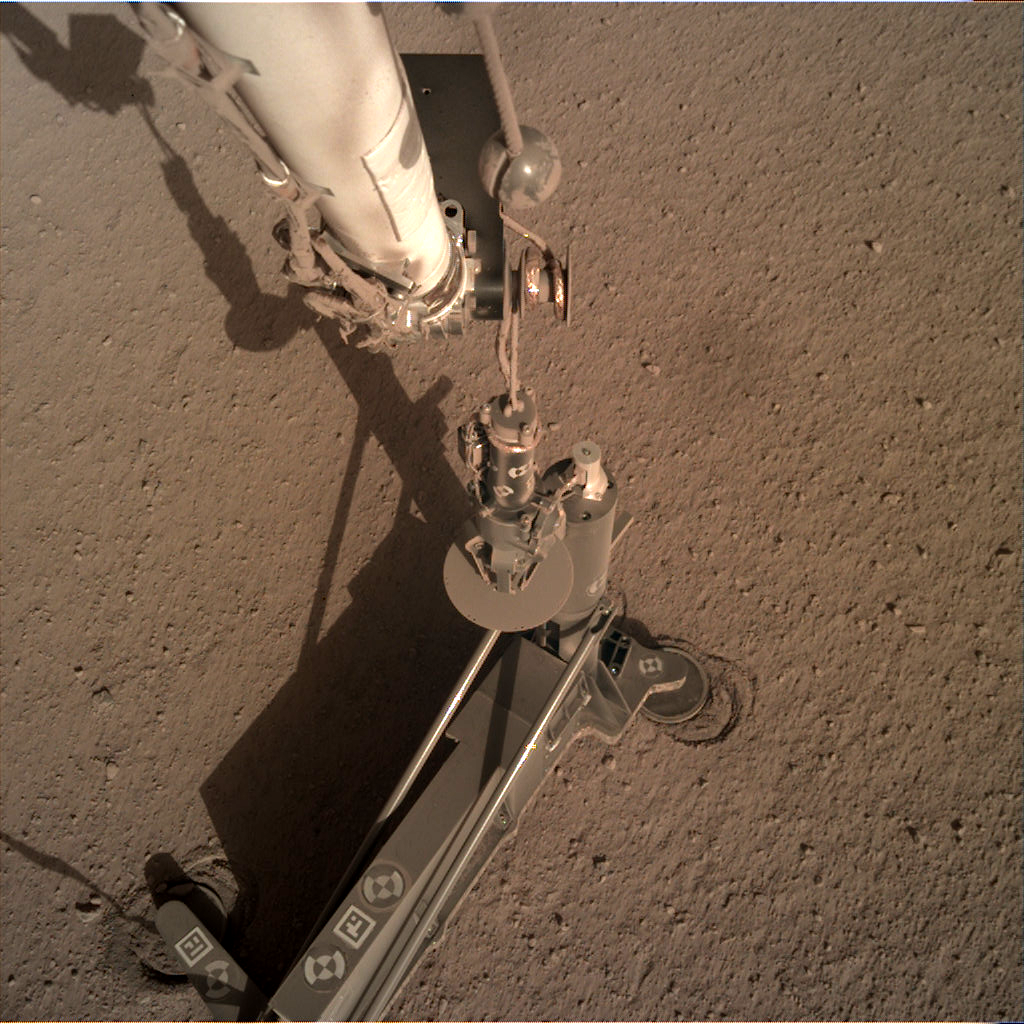
Il 23 giugno il braccio si è sollevato di 12 cm. Gli esiti di questa prima mossa hanno entusiasmato i tecnici a terra, in primo luogo perché si è dimostrato che il cavo non era bloccato nella struttura: sollevando quest’ultima la sonda non è si spostata; inoltre si è palesata nelle foto una situazione decisamente compatibile con le ipotesi fatte nelle settimane precedenti.
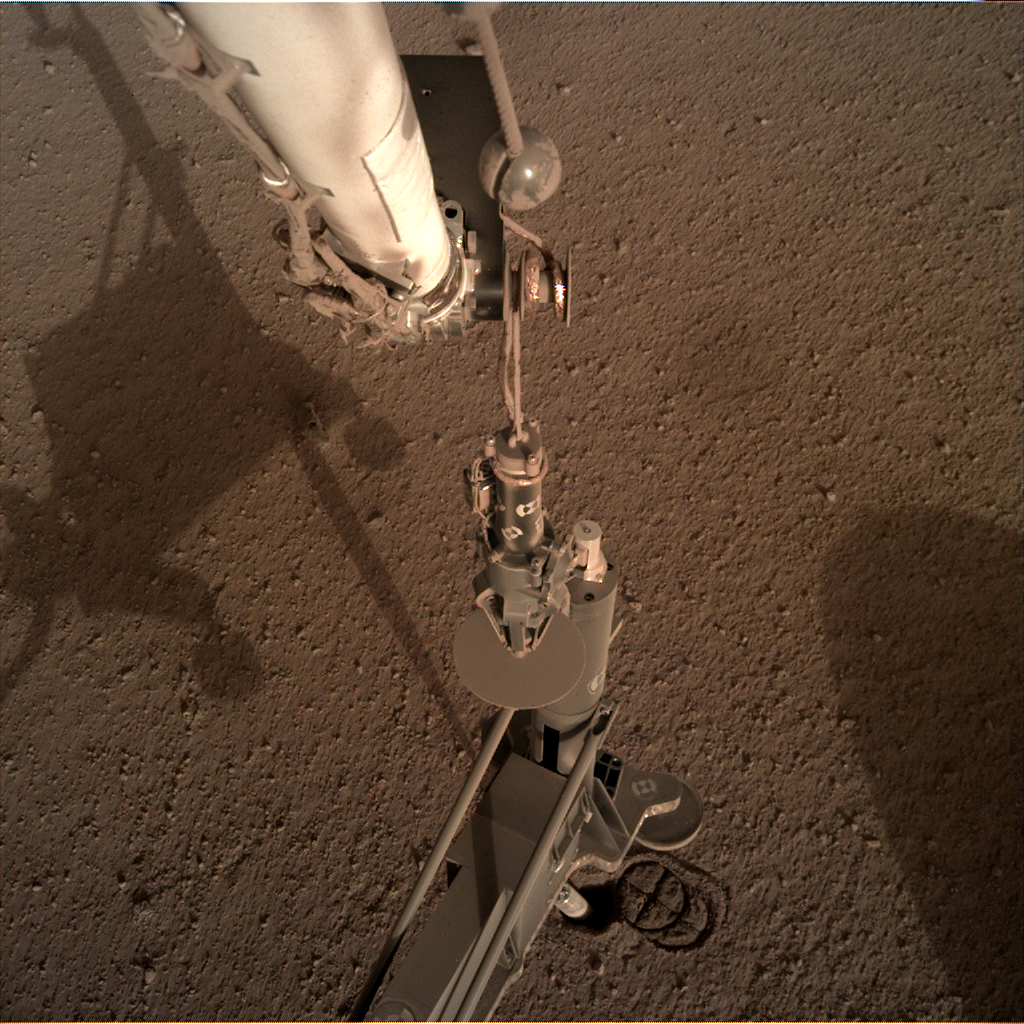
«Già il primo sollevamento» ha commentato Tilman Spohn sul suo blog «ha rivelato la cavità che circonda la talpa. Gli altri membri del team e io siamo rimasti un po’ scioccati quando abbiamo visto quanto è grande. Il suo diametro è circa due volte quello della talpa. Il fondo della cavità è difficile da vedere […], ma sembra che sia profondo circa 2-2,5 volte il diametro della talpa, che è di 27 mm. Quindi la talpa deve aver compattato la regolite. Oltre al proprio volume, deve aver spostato circa la metà del volume interrato.»
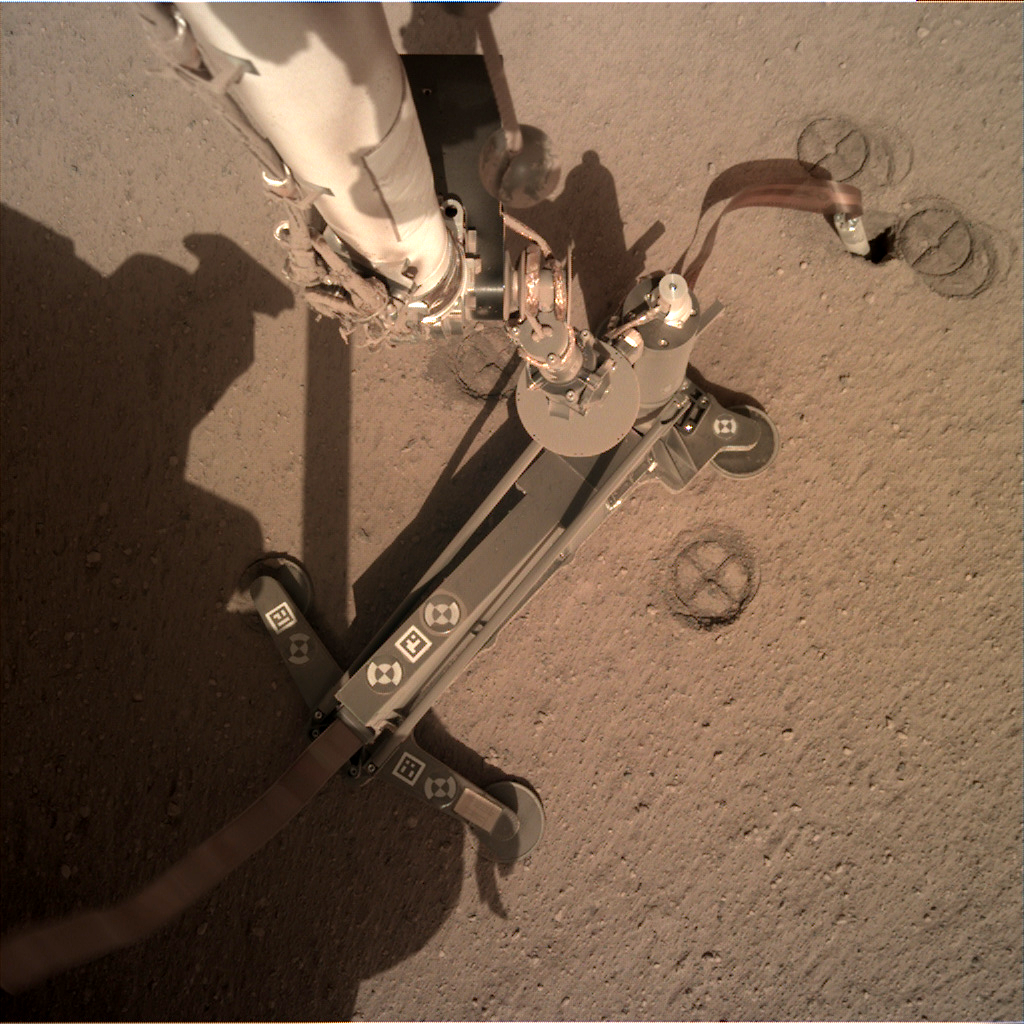
Un ulteriore sollevamento, eseguito il 29 giugno, ha portato la struttura a un’altezza di 25 cm. Il cavo è apparso piuttosto teso, anche se il penetratore è rimasto in sede.
Lo stesso giorno è stata ultimata anche la terza tappa, il ricollocamento della struttura sulla superficie, una ventina di centimetri dietro la posizione precedentemente occupata, come appare evidente dalle impronte lasciate sul terreno.
Nelle prossime settimane saranno inviati i comandi che permetteranno al manipolatore del braccio robotico di lasciare la presa sulla struttura e di porsi in posizione di riposo, condizione necessaria per l’impiego della pala. Questa operazione consentirà di rimettere in moto la talpa, con l’auspicio di vederla sprofondare nel sottosuolo marziano.
InSight non sarà un fallimento
Si tratta solo di una ragionevole speranza. Nonostante il pieno successo della prima parte di un intervento di soccorso del tutto inedito rispetto ai piani, non si può ancora essere certi che il programma di indagine di HP3 potrà essere portato a termine. Anche il caso più sfortunato, tuttavia, per quanto amaro, non ci consentirà di giudicare un fallimento la missione InSight.
Al di là della talpa, infatti, gli altri sensori sono in funzione e stanno già producendo dati scientifici. Alcuni di essi sono attivi sin dal giorno della discesa del lander sul suolo marziano; tra gli strumenti dell’Auxiliary Payload Sensor Subsystem (APSS), ad esempio, i rilevatori che registrano temperatura, pressione atmosferica e velocità del vento. Il 19 febbraio scorso NASA ha anche messo a disposizione del pubblico un aggiornamento quotidiano sul meteo presso Elysium Planitia.
Attivo sul deck di InSight è anche il primo magnetometro mai usato sulla superficie di Marte. Lo strumento, costruito dalla University of California, permette di studiare le variazioni del campo magnetico indotto dall’interazione del vento solare con la ionosfera marziana e di trarre informazioni sulle dimensioni del nucleo metallico del pianeta.
La natura del nucleo, ad esempio la risposta alla domanda se sia solido o liquido, è oggetto anche delle indagini del Rotation and Interior Structure Experiment (RISE) che, misurando accuratamente ogni giorno la posizione del lander, è in grado di rilevare le piccole oscillazioni dell’asse di rotazione di Marte che dipendono, oltre che dall’attrazione del Sole, dalla struttura interna del pianeta.
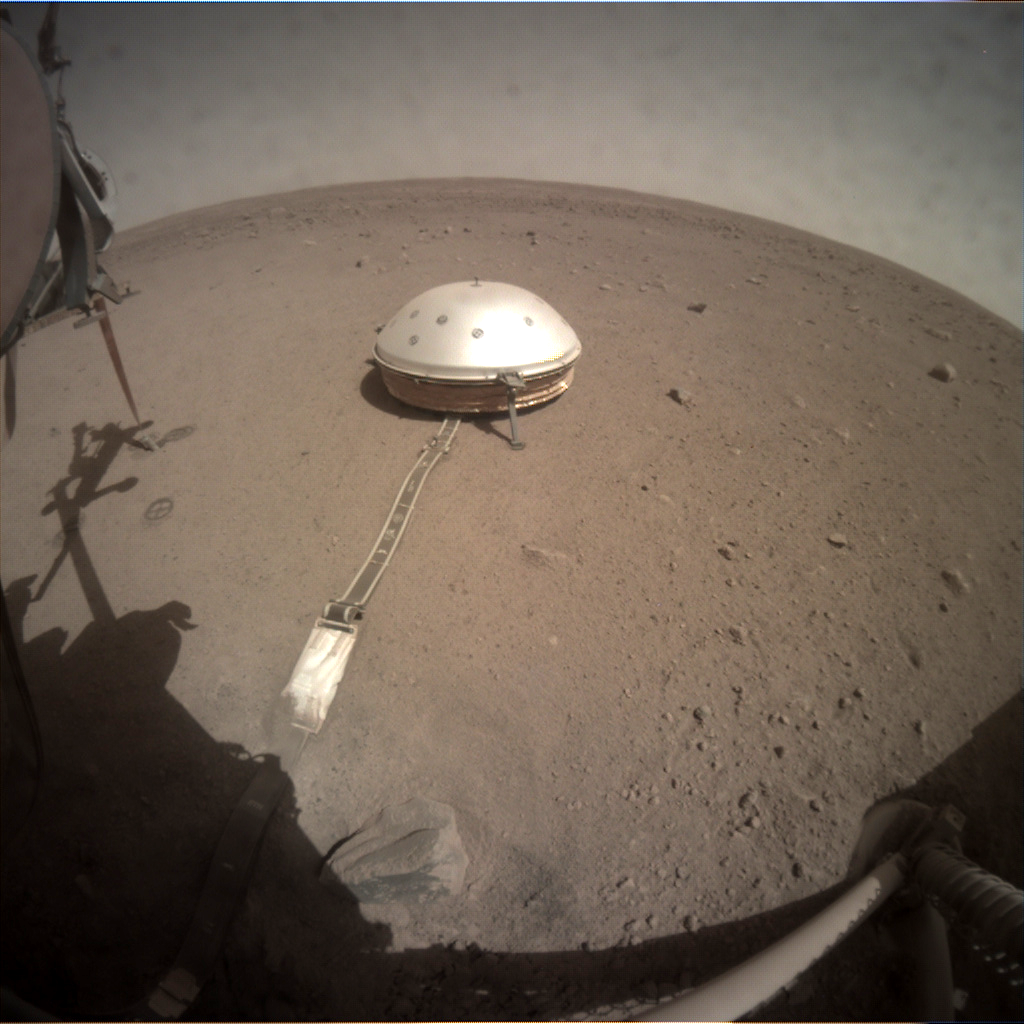
Dal 2 febbraio, quando è stata ultimata la sua installazione con la collocazione del Wind and Thermal Shield, la protezione contro gli effetti del vento e delle temperature marziane, è attivo anche il sismometro (Seismic Experiment for Interior Structure, SEIS) deposto sulla superficie antistante il lander già il 19 dicembre. Lo strumento, che inizialmente ha registrato gli effetti del vento o le vibrazioni prodotte dal braccio robotico o dalla talpa, il 6 aprile ha rilevato il suo primo terremoto. L’evento era troppo debole per fornire informazioni sul sottosuolo, ma è stato seguito da altre scosse; quella più significativa, il 5 giugno, ha raggiunto una magnitudo di 3.0.
Frattanto, il 24 maggio, veniva messa pubblicamente a disposizione degli studiosi la prima release dei dati raccolti dallo strumento:
Va infine ricordato che oltre alla talpa e al science tether con i suoi sensori, l’esperimento HP3 comprende un altro strumento, attivo e funzionante, il radiometro montato sul lander, in grado di rilevare la temperatura al suolo. Tra il 5 e l’8 marzo, mentre i tecnici cercavano di risolvere i problemi del penetratore, il radiometro ha rilevato il calo di temperatura, di circa 1 °C, prodotto dall’ombra del satellite Phobos, che ha eclissato per tre volte per poche decine secondi il Sole sopra InSight. Anche da questi fenomeni, misurati per la prima volta da una sonda su Marte, i ricercatori ritengono di poter ricavare utili informazioni sulle caratteristiche del suolo.
 Questo articolo è © 2006-2026 dell'Associazione ISAA, ove non diversamente indicato. Vedi le condizioni di licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
Questo articolo è © 2006-2026 dell'Associazione ISAA, ove non diversamente indicato. Vedi le condizioni di licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.

Ottimo articolo, davvero dettagliato.
Spero vivamente riescano a risolvere il problema, buona fortuna NASA!