






Il GPS – Global Positioning System
Il termine GPS è entrato da molti anni nel lessico comune. Tutti noi abbiamo smartphones e navigatori satellitari, e nel mondo si stima esistano 6 miliardi di telefoni cellulari, la maggior parte dotati di ricevitore GPS, senza contare gli autoveicoli ed altri dispositivi portatili. Le applicazioni spaziali per il posizionamento terrestre fanno parte della nostra vita, ma spesso non sappiamo come funzionino. Con questo articolo tenteremo di chiarire alcuni degli aspetti fondamentali di questa complessa tecnologia.
© Wikipedia
Nascita
Il Global Positioning System, ora definito NAVSTAR GPS, venne ideato a fine anni ’60 e nacque ufficialmente nel 1973 sfruttando le precedenti esperienze con i sistemi di navigazione satellitare, in particolare la costellazione Transit. Gestito dall’aeronautica USA, il sistema GPS è co-finanziato dal Dipartimento dei Trasporti degli Stati Uniti (DOT). Il sistema dipende dall’Air Force Space Command, ed è controllato dal GPS Operating Center (GPSOC) a Colorado Springs (CO). Il primo lancio della costellazione avvenne nel 1978.
A giugno 2018 il sistema è composto da trentuno satelliti attivi appartenenti a cinque generazioni differenti, disposti su sei piani orbitali inclinati di 55°. I satelliti sono in orbita a circa 20.000 km di quota, per la precisione a 26.560 km dal baricentro della Terra. In questo modo percorrono esattamente due orbite ogni giorno siderale. Le orbite sono circolari, con eccentricità molto piccola, e sono tali per cui un utente posto alle medie latitudini abbia in vista, tipicamente, una decina di satelliti.

Ogni satellite del sistema GPS ha a bordo almeno tre orologi atomici, alcuni a fascio di cesio, altri a gas di rubidio, e trasmette su diverse frequenze una serie di segnali di tempo. Un compito primario delle stazioni di controllo a terra è la continua misura e correzione degli orologi di ogni satellite, in modo che il tempo trasmesso da ognuno sia riconducibile ad una scala comune.

Come funziona il GPS
Immaginate di avere un orologio ultra preciso, ovvero di conoscere alla perfezione l’ora, e di misurare l’istante in cui lo stesso segnale orario vi arriva dal satellite. Conoscendo la posizione dello stesso saprete di essere ad una determinata distanza dal satellite, data dalla differenza di tempo moltiplicata per la velocità della luce. In realtà ora sapete di trovarvi sulla superficie di una sfera, su tutti i punti della quale i segnali del satellite arrivano con lo stesso ritardo, quello misurato.
Misurando il ritardo dei segnali di tre satelliti potete definire tre sfere, che per semplici considerazioni di geometria si intersecano in due punti. Tipicamente uno dei due è impossibile (sottoterra), e l’altro sarà la vostra posizione. Sembra semplice, no? Bastano un campione atomico di tempo agganciato alla scala UTC, ed un cronometro preciso. Qui il processo è illustrato in due dimensioni, per chiarezza:

© VECTORNAV
In realtà le cose sono un filo più complicate: voi non avete un orologio ultra preciso, quindi non conoscete l’orario con una grande precisione, e allora vi serviranno non tre ma quattro satelliti per “fare il punto”. In altre parole, con quattro misure di ritardo di propagazione del segnale il ricevitore può risolvere un sistema di quattro equazioni in quattro incognite, che guarda caso sono latitudine, longitudine, altezza sul livello del mare e ora. Bingo!
Per fare questo calcolo il ricevitore deve acquisire da ogni satellite molte informazioni, oltre al segnale orario: le sue effemeridi (determinazione esatta dell’orbita, per sapere dove fosse il satellite al momento dell’emissione del segnale), lo scarto dell’ora del satellite rispetto alla scala UTC, la correzione relativistica da applicare (ne parleremo più avanti), il ritardo dovuto alle condizioni ionosferiche, e lo stato di integrità del satellite. Con tutte queste informazioni il ricevitore cerca di calcolare uno “pseudo-range”, cioè una prima soluzione di posizione e tempo. Sulla base di questa poi cerca di affinare il calcolo, facendo convergere le stime su una posizione accurata, che è quella che vi presenta sul display. È questo il cosiddetto “fix”, la vostra posizione corrente. È il caso rappresentato dal triangolo giallo nell’ultimo riquadro dell’immagine precedente, che rappresenta l’incertezza della prima soluzione.
Per eseguire acquisizione e calcolo occorrono pochi secondi dall’accensione del ricevitore se si fa un “hot start”, ovvero se il ricevitore conosce già approssimativamente tempo e posizione (ad esempio, dall’ultimo fix e dall’orologio di sistema). Se invece si parte da zero, ovvero senza avere alcuna informazione preventiva, il primo fix può richiedere diversi minuti. Normalmente sarà poco accurato, ma viene affinato dal ricevitore in alcuni secondi. Molto dipende dalla generazione del ricevitore, dalla bontà dei segnali ricevuti e dalla potenza di calcolo disponibile.

© Garmin
Canali
L’accuratezza del sistema è migliore se il ricevitore può elaborare contemporaneamente i dati di più satelliti. Fermo restando che con 4 satelliti si può avere un fix, ottenere dati da ulteriori sorgenti permette di accelerare il tempo del primo fix e di affinare la posizione eseguendo il calcolo della soluzione per ogni quaterna di satelliti. Oggi i ricevitori in uso hanno un minimo di sei canali, che possono arrivare fino a oltre 30 (99 in acquisizione, 30 in tracking), per poter usare contemporaneamente tutti i dati di più costellazioni (non esistono solo i satelliti GPS, come vedremo).
Condivisione di frequenza
Tutti i satelliti GPS e gli europei Galileo usano alcune frequenze in comune, in particolare il canale L1 a 1575,42 MHz. Per condividere una frequenza tra molti utenti ci sono diverse tecniche. In particolare, i satelliti di radionavigazione usano un sistema detto a spettro allargato (Spread Spectrum). Il segnale del satellite viene disperso su un ampio spettro di frequenze mescolandolo con un codice binario pseudo-casuale, unico per ogni satellite (PRBS, pseudo-random binary sequence). Il ricevitore quindi riceve tutti i segnali assieme, e per ogni possibile codice PRBS esegue una operazione di correlazione, ovvero cerca di comparare quanto ricevuto con la sequenza attesa. L’istante in cui un codice combacia è anche il “tic” temporale del satellite in oggetto. Quindi con questo sistema si ottengono due risultati: condividere il canale tra decine di satelliti con limitata interferenza reciproca, e trasmettere con precisione il segnale di tempo. Il segnale ricevuto assomiglia a rumore bianco, semplice soffio se ascoltato, finché non lo si decodifica. Questo approccio semplifica di molto l’architettura hardware dei ricevitori, ed evita, ad esempio, di dover assegnare una frequenza univoca ad ogni satellite.
Il canale L1 trasmette il codice detto C/A (coarse acquisition, acquisizione grossolana) ed è l’unico accessibile da parte degli utenti civili. I militari hanno a disposizione un altro segnale, detto P/Y (precision), trasmesso sulla frequenza L2 (1227 MHz) che permette la localizzazione di alta precisione. I codici (cioè le sequenze PRBS) usati per codificare il segnale P/Y sono segreti.
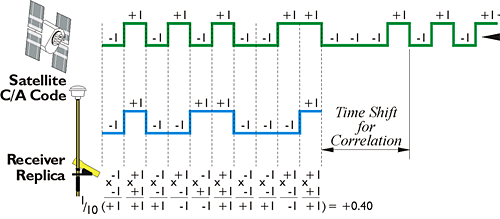
© Penn State
Errori del sistema
All’origine si temeva che il sistema civile (codice C/A) fosse fin troppo accurato, potendo essere comunque usato per scopi militari, e quindi si introdusse un elemento di disturbo arbitrario, detto SA (Selective Availability). La SA degradava la precisione del GPS a passi, fino a generare una incertezza totale di 200-300m. Poi gli sviluppi della tecnica dei ricevitori (tecnica “carrier phase” usata ad esempio in geodesia) hanno reso superflua la SA, che è stata cancellata con decreto del presidente Bill Clinton nel 2000.
Restano però molte sorgenti di incertezza. La prima è l’esatta determinazione dell’orbita, influenzata da molte perturbazioni difficili da prevedere, come la pressione del vento solare. Poi c’è la deriva degli orologi di bordo, che devono essere continuamente corretti (c.d. steering). In ultimo, la densità elettronica della ionosfera ha a che fare con l’attività solare, con la stagione, e il ciclo giorno/notte, e produce un ritardo nella propagazione dei segnali. Avendo disponibili due frequenze (C/A e P/Y) i ricevitori militari possono stimare questo dato, e correggerlo. I ricevitori GPS civili invece non lo possono fare. Un altro problema è il cosidetto multipath cioè la ricezione del segnale attraverso riflessioni multiple. È quello che avviene nei “canyon urbani” formati dai palazzi delle nostre città. Qui i ricevitori spesso non hanno vista diretta di un numero sufficiente di satelliti, e ne ricevono alcuni per riflessione sulle facciate dei palazzi circostanti; questo ovviamente degrada il calcolo della posizione, in quanto il tempo di arrivo del segnale non è quello di minimo percorso. Infine, un punto correlato al precedente, la disposizione sulla volta celeste dei satelliti è critica: per un’ottima localizzazione occorre vedere satelliti bassi sull’orizzonte, ed è cosa difficile dal piano stradale di una città.

© GpsWorld
Jamming e spoofing
Il segnale trasmesso dai satelliti a 20.000 km di quota ha una potenza di poche decine di watt. Quello che arriva alla microscopica antenna del vostro smartphone è di circa -165 dBW, ovvero mezzo decimo di milionesimo di miliardesimo di W, o 5*10^-16 W. Comunque lo scriviate, è un segnale debolissimo, e la sua ricezione e decodifica sono veri miracoli della tecnologia. La contropartita è che disturbare un segnale così debole è piuttosto facile. Ci sono tantissimi modi di disturbare il GPS, volontari e non. Ad esempio, si racconta di un pescatore californiano che alla sera accendeva il televisore sulla sua barca, ancorata a qualche decina di miglia da una base militare. Il pre-amplificatore dell’antenna TV sulla barca era difettoso, e oscillava trasmettendo un segnale proprio sulla frequenza L1. L’individuazione del disturbo non fu facile, a causa della bassa potenza coinvolta e della casualità dell’evento; il segnale GPS era compromesso nell’arco di alcune decine di miglia.
Il jamming (disturbo) è relativamente facile da identificare in quanto porta all’impossibilità di stabilire la posizione (mancato fix), mentre lo spoofing, cioè la generazione di un segnale falso tale far credere al ricevitore di essere da un’altra parte, può essere ben più difficile da rilevare. Lo spoofing è piuttosto semplice da realizzare con i mezzi odierni, al punto che i sistemi civili critici e quelli militari incorporano sofisticate tecniche di anti-jamming e anti-spoofing.

© Lignex
Gli effetti relativistici
I sistemi di navigazione satellitare, per funzionare, devono tenere conto anche del fatto che non esistono un tempo ed uno spazio assoluti, e quindi occorre applicare delle correzioni secondo le leggi della relatività speciale e di quella generale, quelle descritte da Einstein nel 1905 e 1915. In particolare gli orologi imbarcati sui satelliti, che sono in continuo movimento, rallentano rispetto a quelli sulla Terra di circa 7 microsecondi al giorno; la causa è la compressione relativistica dello spazio e del tempo (Relatività speciale, corpi in movimento relativo). In compenso, essendo ad una quota elevata sono meno soggetti al campo gravitazionale del nostro pianeta. A 20.000 km di quota il tempo scorre più velocemente che a terra, per l’esattezza di 45 microsecondi al giorno (relatività generale). La correzione totale è quindi di circa 38 microsecondi al giorno, ovvero di 4,4 parti in 10-10. In un microsecondo un’onda elettromagnetica percorre ben 300 metri, per cui una correzione meno che perfetta vanificherebbe l’accuratezza di tutto il sistema di posizionamento.

© H. Fruehauf
Segmento di controllo
Questi sistemi richiedono sofisticati e complessi apparati di controllo a terra. Occorre determinare con precisione le orbite dei satelliti, verificare il comportamento degli orologi e correggerli, monitorare le anomalie, controllare l’assetto, gestire le posizioni orbitali, prevedere l’impatto delle tempeste solari, e così via. Questa è la rete di controllo del GPS, che comprende centri di controllo, centri di monitoraggio e postazioni di determinazione delle orbite, oltre alle loro stazioni ridondate:
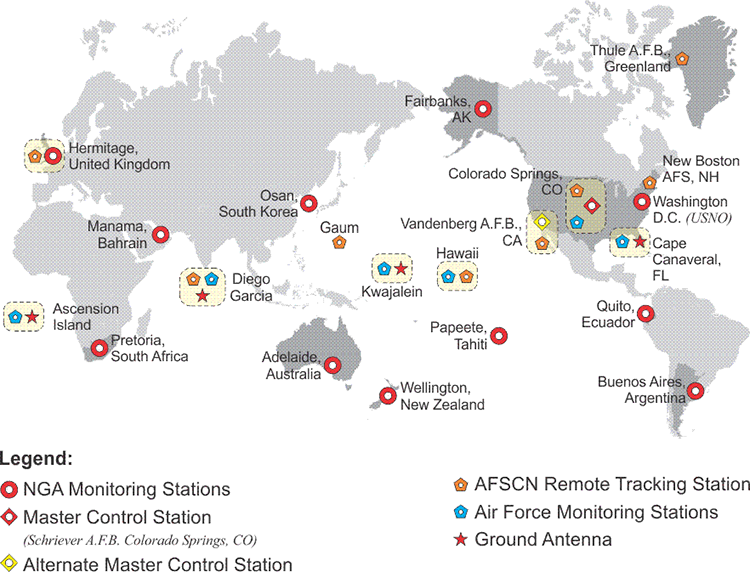
© e-education
I sistemi Galieo, Glonass e altri
Il fatto che un sistema di localizzazione satellitare sia oggi indispensabile per la nostra civiltà ha portato allo sviluppo di altri sistemi alternativi allo statunitense GPS/Navstar, come il russo Glonass o Galileo, il sistema europeo. Esistono poi il Beidou cinese, l’IRNSS, tutti in differenti fasi di implementazione. I dettagli tecnici sono differenti, ma i principi di funzionamento sono simili. Galileo incorpora caratteristiche che non erano state pensate cinquant’anni fa, come il controllo in tempo reale dell’accuratezza dei segnali che devono essere usati per applicazioni critiche (sostegno della vita, navigazione di aeromobili, ecc).
© Wikimedia Commons
Concludendo, la prossima volta che controllerete un indirizzo o la vostra posizione sullo smartphone pensate un attimo ai decenni di ricerca di base e applicata e alle migliaia di persone che tutti i giorni rendono possibile questo vero miracolo della tecnologia.
 Questo articolo è © 2006-2025 dell'Associazione ISAA, ove non diversamente indicato. Vedi le condizioni di licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
Questo articolo è © 2006-2025 dell'Associazione ISAA, ove non diversamente indicato. Vedi le condizioni di licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.

Grazie mille.
Veramente interessante
Molto bello, complimenti
Grazie tante. Veramente un bell’articolo.