






SAR-400: sarà Russo il prossimo robot a bordo della ISS
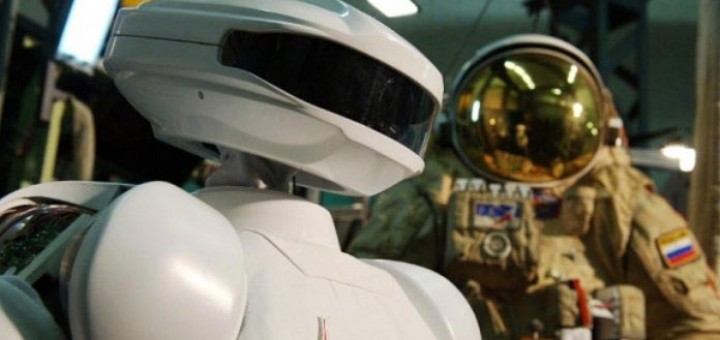
Oltre al già presente Robonaut 2 (NASA/General Motors) ed al piccolo Kirobo (JAXA/Toyota), sulla ISS verrà testato anche un robot antropomorfo di concezione Russa che fa uso di tecnologie inizialmente sviluppate per i programmi Buran e MIR. Si chiama SAR-400 ed è costruito dalla Android Robotics Corporation (NPO-AT).
Come la sua controparte Americana, SAR-400 è stato progettato per dare in futuro un concreto aiuto agli uomini e alle donne a bordo dei veicoli spaziali, svolgendo operazioni di manutenzione e riparazione sia all’interno dei moduli abitati che all’esterno.
Visivamente Robonaut2 e Sar-400 sono molto simili: entrambi hanno le due braccia con mani a cinque dita, le gambe assenti (si prospetta di montarli sul braccio robotico della ISS per le operazioni esterne) e sono teleguidati da operatori umani.

L’interfaccia di controllo dotata di ForceFeedback
SAR-400 ha in più la presenza di un microfono in modo da poter trasmettere i suoni dell’ambiente in cui opera (poco utilizzabile nel vuoto spaziale, sicuramente utile in tutti gli ambienti con atmosfera) e una interfaccia di controllo con capacità di ForceFeedback: in pratica l’operatore può “sentire” la presa degli oggetti manipolati da SAR-400 in tutta sicurezza. Nel caso in cui la mano del robot venisse schiacciata o comunque bloccata, l’addetto al controllo avvertirebbe una pressione in grado di allertare ma senza provocare nessun tipo di danno.
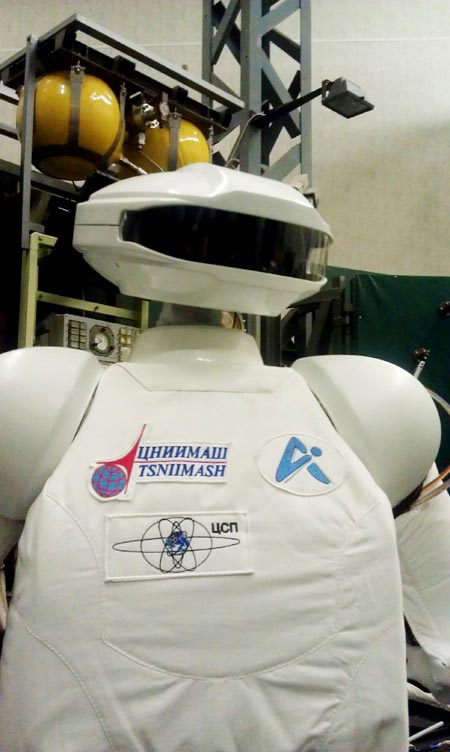
Attualmente il cosmonauta sintetico è in fase di test a terra presso il Gagarin Cosmonauts Training Center all’interno del mockup della MIR. Le sue capacità spaziano dal serraggio di bulloni all’apertura dei portelli, passando per la partita a scacchi.

SAR-400 pesa 144 Kilogrammi
La scelta obbligata del comando in remoto (le intelligenze artificiali attuali non permettono la piena autonomia in ambienti non controllati) pone attualmente dei limiti operativi, quantomeno nell’ottica di una esplorazione totalmente robotica. Infatti un segnale Terra-orbita impiega circa 5 secondi per giungere a destinazione e 15 minuti per arrivare fino a Marte. Per superare questo problema il team di progettisti di SAR-400 sta sviluppando un sistema di controllo ibrido, a metà tra presenza virtuale e autonomia robotica: in pratica l’operatore imposta la posizione iniziale del robot in maniera ottimale rispetto la mansione da svolgere e lascia all’intelligenza artificiale il compito di finire il lavoro.
Con la crescente presenza di automi sulla ISS si apre una nuova corsa alla tecnologia robotica applicata allo spazio. Oltre Russia e Stati Uniti anche la Germania (ESA) ha in progetto un robot di nome JUSTIN (simile nelle caratteristiche morfologiche ed operative a Robonaut 2 e a SAR-400)
Il Giappone che ha già spedito sulla ISS il piccolo KIROBO ha in programma di mandare in orbita anche il famoso ASIMO
I vantaggi di un macchina antropomorfa completamente funzionante, autonoma ed operativa a bordo della ISS sono principalmente due: meno rischi e stress per gli atronauti costretti ad operazioni EVA o di routine e più tempo da dedicare agli esperimenti scientifici a bordo.
La strada per arrivare ad avere i vari Dave, Bishop R2-D2 o C3-PO è lunga, ma comunque già tracciata e in pieno sviluppo.
Fonti e immagini: plasticpals.com
 Ove non diversamente indicato, questo articolo è © 2006-2026 Associazione ISAA - Leggi la licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
Ove non diversamente indicato, questo articolo è © 2006-2026 Associazione ISAA - Leggi la licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
