






Ritorno sulla Terra di Andreas Mogensen dopo 10 giorni a bordo della ISS

L’astronauta ESA Andreas Mogensen, il comandante della Sojuz Gennady Padalka ed Aidyn Aimbetov sono atterrati questa mattina, 12 Settembre, nella steppa del Kazakistan alle ore 00:51 GMT.
Andreas Mogensen, nonostante abbia trascorso soltanto 10 giorni a bordo della ISS, ha condotto in orbita numerosi esperimenti, volti soprattutto alla sperimentazione di nuove tecnologie.
Nel suo primo esperimento Andreas ha filtrato l’acqua di scarico della ISS attraverso una membrana “biomimetica”, sviluppata in Danimarca, che replica il processo naturale di purificazione dell’acqua senza la necessità di alcuna fonte energetica di supporto. Il risultato ottenuto sarà quindi analizzato per comprendere se si potrà usufruire di tale procedimento anche nelle future missioni.
Un altro esperimento ha visto invece Andreas indossare per due giorni una tuta speciale, chiamata SkinSuit, per testare la sua efficienza nell’evitare l’allungamento della spina dorsale degli astronauti in assenza di peso. Il danese ha inoltre prelevato dei campioni biologici per capire se la tuta potrà essere indossata per lunghi periodi.
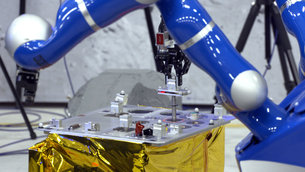
Rover durante l’inserimento del piolo
Ma l’esperimento più interessante, ed anche più complesso, è stato quello del controllo da remoto di un rover situato al Centro ESTEC dell’ESA, in Olanda. Il compito di Andreas consisteva nel controllare dalla ISS il braccio robotico del rover, in modo da posizionare un piolo in un foro presente in una board distante alcuni metri dal robot, chiamata “task board”. Se compiere tale operazione è piuttosto semplice da vicino, non si può dire la stessa cosa se a farlo è un astronauta che orbita a 400 Km di distanza dalla Terra.
La principale novità è stata quella di utilizzare un tipo di controllo chiamato force-feedback, sviluppato all’ESA, che permetteva all’astronauta di percepire la forza di resistenza del braccio del rover durante il controllo, come se lui stesso stesse toccando l’oggetto afferrato dal robot. Le sensazioni tattili che Andreas percepiva sono state di fondamentale importanza per la buona riuscita dell’esperimento. Il tutto doveva inoltre essere effettuato con estrema precisione, poiché si aveva un margine di errore di appena un sesto di millimetro. Il piolo doveva poi essere inserito per almeno 4 cm per permettere un collegamento elettrico.
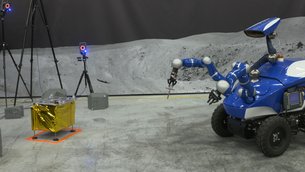
Rover durante l’avvicinamento alla task board
“Siamo soddisfatti dei risultati ottenuti oggi” ha affermato Andrè Schiele, che era a capo dell’esperimento del Centro di Telerobotica ed Aptica dell’ESA. “Questo è il primo controllo ad alta precisione effettuato dallo spazio. Andreas ha impiegato 45 minuti per permettere al rover di raggiungere la task board, ed ha inserito il piolo al suo primo tentativo. Non aveva mai operato sul rover prima, ma appreso rapidamente come poterlo controllare nel modo più opportuno”. La vera sfida in questo caso era ricevere un valore di forza che fosse sufficiente per poter muovere il braccio, nonostante la distanza da cui veniva ricevuto il segnale di controllo. Si deve infatti considerare un tragitto che parte dalla ISS, la quale viaggia ad una velocità di circa 28800 Km/h, ai satelliti che si trovano a quasi 36000 Km di distanza , per poi arrivare alla stazione a terra nel New Mexico, passando attraverso il centro della NASA a Houston, ed infine all’ESTEC. Il percorso totale (andata e ritorno del segnale di comunicazione) è di circa 144000 Km.
Per la riuscita dell’esperimento sono stati utilizzati dei particolari software, utilizzando un controllo dedicato, denominato “model mediated control”, per compensare il ritardo di comunicazione, evitando così la perdita di sincronizzazione nella trasmissione dei comandi dalla ISS.
Il rover Interact Centaur, con cui è stato condotto l’esperimento, è stato sviluppato in collaborazione con alcuni studenti della Delft University of Technology. Il robot 4×4 possiede un sistema di visione, oltra a due bracci robotici che sono comandati da remoto ed una serie di sensori di prossimità e posizione.
Andreas ha inoltre utilizzato un joystick per rilevare vari valori di rigidezza per differenti molle, in modo da poter comprendere meglio come varia la sensibilità tattile degli astronauti in orbita, soprattutto per controlli ad elevata precisione come quello effettuato.
In futuro questi robot potrebbero essere utilizzati ad esempio per comandare da terra bracci robotici coinvolti nella rimozione di detriti intorno al nostro pianeta, oppure per costruire una base sulla Luna. Tale controllo è stato inoltre realizzato in condizioni di comunicazione non perfette, con una connessione piuttosto lenta. Questo permetterà di poterlo utilizzare sulla Terra anche in circostanze catastrofiche, come ad esempio dopo un terremoto.
La missione IRISS non termina qui per Andreas, che farà ben presto ritorno al Centro ESA degli astronauti a Colonia, in Germania, sia per il processo di riabilitazione che per essere monitorato dai ricercatori riguardo alcuni esperimenti.
Il prossimo astronauta ESA ad andare in orbita sarà Timothy Peake, per una missione di 5 mesi chiamata Principia. Il lancio è programmato per il 15 Dicembre.
Fonti: ESA
Copyright immagini: ESA
 Questo articolo è copyright dell'Associazione ISAA 2006-2026, ove non diversamente indicato. - Consulta la licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
Questo articolo è copyright dell'Associazione ISAA 2006-2026, ove non diversamente indicato. - Consulta la licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
