






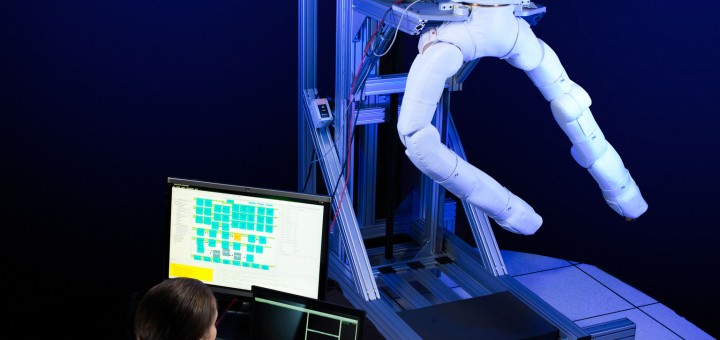
Le gambe di Robonaut 2 in partenza per la ISS a bordo di Dragon (SpX-3)
Robonaut 2, il robot umanoide della NASA a bordo della ISS, riceverà presto in dotazione un paio di gambe prensili che verranno inviate verso la Stazione Spaziale Internazionale a bordo della capsula Dragon con la missione di rifornimento SpX-3.
Le gambe, sviluppate dal dipartimento NASA Human Exploration and Operations and Space Technology, forniranno ad R2 la mobilità necessaria per affrontare attività ripetitive all’interno e all’esterno della ISS, in un prossimo futuro.
L’obiettivo primario è quello far svolgere a Robonaut alcuni compiti semplici così da poter ottimizzare al meglio il tempo degli astronauti in orbita, permettendo loro di concentrarsi maggiormente su attività critiche o di ricerca scientifica.
Le gambe hanno un’apertura complessiva di circa 2,75 metri e forniranno ad R2 una grande flessibilità, necessaria per i movimenti nell’ambiente ristretto della ISS. Ogni gamba è dotata di sette giunti mobili ed uno speciale dispositivo prensile al posto del piede, chiamato end effector. Quest’ultimo permetterà a Robonaut di aggrapparsi alle maniglie e a vari appigli all’interno e all’esterno della Stazione. Ogni end effector sarà dotato di un sistema di visione e di guida che verrà utilizzato successivamente per automatizzare i movimenti e le operazioni di aggancio ai supporti.
Le gambe di Robonaut 2 sono già predisposte per l’ambiente esterno alla ISS, tuttavia il corpo di R2 necessiterebbe di un consistente upgrade prima di poter operare nello spazio.

Robonaut 2 stringe la mano al comandante della ISS Dan Burbank.
R2 si trova sulla ISS da febbraio 2011, al momento è agganciato ad un supporto fisso, svolge varie sperimentazioni e attività di simulazione a bordo della ISS in collaborazione con gli astronauti.
Robonaut 2 ha già svolto una serie di operazioni preliminari per dimostrare le sue funzionalità nell’ambiente di microgravità, ad esempio: pressione di pulsanti e bottoni, accensione di interruttori, utilizzo di switch, uso di un pannello di controllo ecc…
R2 è stato il primo robot a stringere una mano umana nello spazio, quella di Dan Burbank, è in grado di parlare con il linguaggio dei segni, ed è capace di utilizzare due attrezzi in dotazione agli astronauti: il misuratore del flusso d’aria e lo scanner RFID, usato per l’inventario. Robonaut sotto la guida dell’astronauta Tom Marshburn ha dimostrato di essere in grado di afferrare un oggetto libero in moto all’interno del modulo Destiny.
In previsione dell’utilizzo futuro R2 ha lavorato anche con le coperte termiche e altri materiali flessibili, sia comandato dal controllo missione sia guidato dagli astronauti sulla ISS.
I primi test con le gambe sono previsti per la fine di giugno: inizialmente verranno eseguiti dei controlli di movimento dei giunti e degli end effector, successivamente verranno provati i primi movimenti liberi.
Le tecnologie e l’intero programma di sviluppo di Robonaut ha avuto alcuni risvolti importanti anche sulla Terra, il team che segue il progetto è giunto anche allo sviluppo di un esoscheletro che porrebbe permettere agli astronauti un migliore adattamento nello spazio e potrebbe aiutare persone con disabilità qui sulla Terra.
Fonte: Parabolic Arc.
 Questo articolo è © 2006-2026 dell'Associazione ISAA, ove non diversamente indicato. Vedi le condizioni di licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
Questo articolo è © 2006-2026 dell'Associazione ISAA, ove non diversamente indicato. Vedi le condizioni di licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
