






Un nuovo sistema di docking universale per l’ISS
Dopo una correzione in corsa avvenuta nel 2012 che si è appena concluso, gli sforzi da parte del programma dell’International Space Station per lo sviluppo di un nuovo sistema di docking universale standard da utilizzare sul laboratorio orbitale internazionale e sui futuri veicoli per l’esplorazione dello spazio profondo, sono sulla giusta rotta per il debutto operativo previsto per il 2017.
I concorrenti che stanno partecipando alla gara indetta dalla NASA, per lo sviluppo di un nuovo sistema commerciale per il trasporto umano – la Boeing con il CST-100, la Sierra Nevada con il Dream Chaser e la SpaceX con la Dragon – sono allineati per dare inizio all’utilizzo del nuovo sistema di aggancio universale dell’agenzia spaziale americana; il NASA Docking System (NDS). Le prime missioni commerciali con equipaggio sono programmate dalla NASA per il 2017 e sempre per questo anno si prevede di equipaggiare due boccaporti di aggancio del Segmento Statunitense dell’ISS, per accogliere il nuovo sistema non proprietario NDS.
Per favorire la qualifica dello standard internazionale NDS per i rigori dello spazio profondo, sono previsti diversi anni di operazioni sulla Stazione con il Soft Impact Mating Attenuation Concept (SIMAC) della Boeing, che ha sostituito l’International Low Impact Docking System (iLIDS) della NASA.
“La linea di principio che sta alla base di tutto, è quella di un progetto più semplificato e nel complesso più leggero e meno costoso,” Queste le parole di Mike Suffredini, il program manager dell’ISS, che ha proseguito, “Vogliamo andare oltre l’orbita bassa terrestre, un giorno, ed uno degli scopi della Stazione spaziale è proprio quello di spingere al limite i sistemi critici sulla Stazione stessa, prima di poterli impiegare nello spazio profondo.”
L’obiettivo del NASA Docking System è quello di ospitare i dockings fra veicoli spaziali dotati di una massa compresa fra le 5 e le 350 tonnellate.
Un po’ di storia
La guida del progetto venne affidata al Johnson Space Center della NASA nel 1996, ed allora era denominato Advanced Docking Berthing System e di seguito Low Impact Docking System (LIDS) quando venne adattato al progetto del Crew Rescue Vehicle X-38. L’X-38 venne abbandonato nel 2002, ma lo sviluppo del sistema di aggancio continuò sebbene senza uno scopo certo. Nel 2004 Bush figlio annunciò il progetto Vision for Space Exploration e di seguito la NASA emise nel 2005 l’Exploration Systems Architecture Study, nel quale veniva raccomandato l’impiego del LIDS nel Crew Exploration Vehicle e su tutti gli elementi relativi all’esplorazione a venire. Nel 2009 durante la missione dello Space Shuttle Alantis STS-125, venne montato sull’Hubble Space Telescope il Soft Capture Mechanism (SCM) che era stato ideato per il docking non pressurizzato e che impiegava l’interfaccia LIDS per avere la possibilità di ricevere una missione del Multi Purpose Crew Vehicle.
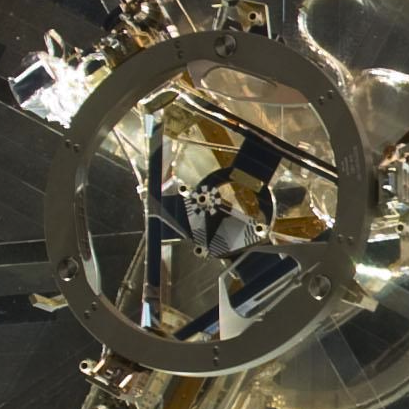
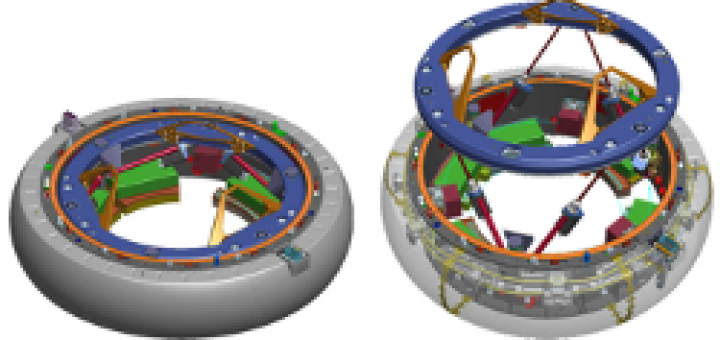
Il Soft-Capture Mechanism (SCM) aggiunto nel 2009 all’ Hubble Space Telescope. L’SCM permette sia ai veicoli manned che a quelli unmanned che impiegano il NASA Docking System (NDS), di agganciarsi ad esso. (C) NASA, Wikipedia
L’anello di docking verrà utilizzato per il deorbit in sicurezza del telescopio spaziale al termine della sua missione. Il progetto NDS ha avuto la sua genesi con una discussione sullo sviluppo di un International Docking System Standard, tenuta nel 2009 dai rappresentanti dell’ISS Multilateral Control Board, per incoraggiare una maggiore collaborazione nello spazio e una maggiore capacità di salvataggio. Nel Febbraio del 2010 il programma LIDS è stato modificato dalla NASA per soddisfare le esigenze dell’IDSS e per dimostrare il suo impiego convertendo i docking ports dell’USOS dell’ISS in docking ports IDSS . Nel processo di trasferimento del LIDS dal Programma Constellation all’ISS, esso è divenuto l’International LIDS o iLIDS che più tardi è divenuto il NASA Docking System (NDS). Nel Maggio del 2011 è stata completata la Critical Design Review dell’NDS e la qualifica dovrebbe essere raggiunta per questo 2013. iLIDS prevedeva l’eliminazione della necessità di azionare i propulsori dello Shuttle, nei momenti immediatamente seguenti al contatto.
Correzione in corsa
Un memo interno della NASA datato 13 Novembre 2012, diffuso poi dai media, ha annunciato al team di sviluppo che l’Agenzia aveva deciso di ritirare ed archiviare il progetto mettendo invece sotto contratto la Boeing per lo sviluppo del suo progetto SIMAC (evidentemente conforme alle specifiche IDSS – n.d.r.). Secondo questo memo, il lavoro dei progettisti di Houston non era da cessare subito, ma era da terminare e poi da archiviare con la corretta redazione della relativa documentazione tecnica, per un suo eventuale utilizzo futuro.
Suffredini ha spiegato che l’accantonamento della soluzione iLIDS in favore del dispositivo SIMAC come nuovo standard internazionale per l’ISS e per l’Orion Multipurpouse Crew Vehicle nella sua riproposizione post-Constellation, è stato dovuto sia a motivazioni economiche e di peso, che per risolvere alcune problematiche ingegneristiche, come ad esempio, la larghezza dell’anello di contatto soft; che nel sistema iLIDS limitava le dimensioni del tunnel di connessione fra i due veicoli congiunti, con ripercussioni negative sul passaggio degli astronauti e dei carichi.
Durante la fase di valutazione, i russi hanno spinto per il mantenimento del diametro a 800 mm tipico del sistema probe-and-drogue utilizzato dalle capsule Sojuz e Progress, oltre che dall’APAS (Androgynous Peripheral Attach System) sempre di derivazione russa, usato dallo Shuttle per i suoi dockings con l’ISS.
Per incontrare anche queste esigenze, i managers dell’ISS hanno scelto il sistema SIMAC proposto dalla Boeing.
Il sistema iLIDS faceva affidamento su di un network di magneti e di controlli software, che gestivano l’anello di cattura soft per lo smorzamento dei carichi iniziali dovuti al contatto e che guidavano i chiavistelli e gli attuatori del vecchio hardware APAS.
SIMAC
Gli agganci fra due veicoli spaziali si svolgono in due fasi denominate “soft capture” ed “hard capture”, che generalmente durano circa 20 minuti. La prima unisce i due veicoli, la seconda li attira reciprocamente per formare una tenuta ermetica.
Il dispositivo SIMAC è un sistema composto da attuatori, che si confà alle esigenze del sistema internazionale a basso impatto. Una di esse, è quella di unire una coppia di veicoli spaziali leggeri, con una massa di 5 tonnellate ciascuno, con conseguente alterazione delle caratteristiche del centro di gravità del sistema. SIMAC, che ha raggiunto la fase di Pre-preliminary Design, non eliminerà la necessità della spinte propulsive post-contatto, inoltre è dotato di sole due centraline elettroniche anziché di sei.
“Preferiamo evitare le accensioni dei propulsori post-contatto, ma le specifiche attuali al momento non lo evitano. Dai dati iniziali si evince che in un docking nominale non dovrebbe essere necessario azionare i propulsori,” Ha proseguito Suffredini. “Esplorando tutte le differenti modalità, condizioni ed angolazioni di contatto, dovremo verificare se sarà necessario l’intervento dei propulsori in determinate occasioni. Questo è un buon compromesso.”
La bassa complessità del SIMAC è importante per il raggiungimento dell’obiettivo di creare delle specifiche non coperte da brevetto che potranno supportare la produzione da parte di diversi fornitori statunitensi, permettendo inoltre il loro utilizzo su scala globale.
Il NASA Docking System sull’ISS
Il NASA Docking System, così come attualmente concepito, richiederà delle modifiche sui due punti di attracco equipaggiati con il sistema APAS del Segmento Statunitense della Stazione Spaziale Internazionale, ovvero i PMA (Pressurized Mating Adapter) anteriore e di zenith del Nodo-2. L’ISS Docking Adapter (IDA), attualmente in fase di produzione, modificherà il meccanismo di soft capture dell’anello interno dell’APAS per accogliere i veicoli commerciali abitati dotati del dispositivo SIMAC.
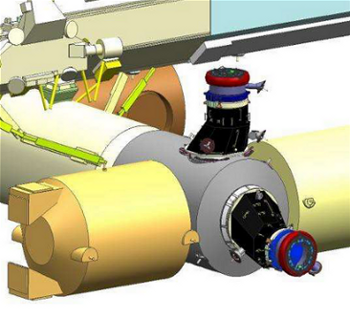
Una rappresentazione grafica degli adattatori IDA montati sui PMAs del Node-2 (C) NASA, Wikipedia.
I due adattatori IDA dovrebbero essere pronti per la spedizione sulla Stazione nel 2015, stando alle stime di Suffredini, mentre l’hardware del Soft Impact Mating Attenuation Concept (SIMAC) dovrebbe essere pronto l’anno seguente, permettendo alla NASA di fornire le prime unità prodotte al vincitore della gara per il sistema di trasporto commerciale abitato.
Non è escluso che, come è avvenuto per l’iLIDS, anche lo sviluppo del SIMAC comporti delle ricadute commerciali, probabilmente tramite uno Space Act Agreement (SAA) con la NASA.
Fonti: “NASA, ISS Partners Eye New Universal Docking System” di Mark Carreau, pubblicato il 26 Dicembre 2012 su aviationweek.com; NASA; Wikipedia, NASAWatch; Geroge Parma: “Overview of the NASA Docking System and the International Docking System Standard” AIAA Annual Technical Symposium (May 20, 2011).
Immagini: NASA, Wikipedia
 Questo articolo è © 2006-2024 dell'Associazione ISAA, ove non diversamente indicato. Vedi le condizioni di licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
Questo articolo è © 2006-2024 dell'Associazione ISAA, ove non diversamente indicato. Vedi le condizioni di licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
