






Gli astronauti cinesi completano la loro prima EVA dal modulo Tianhe

La scorsa domenica 4 luglio gli astronauti della Shenzhou 12 hanno svolto un’attività extraveicolare per l’installazione di alcuni equipaggiamenti necessari alle operazioni a lungo termine della stazione spaziale cinese.
La seconda storica EVA cinese
Liu Boming è stato il primo a uscire quando in Italia erano le 02:11 di domenica e poco dopo è stato raggiunto dal compagno Tang Hongbo, mentre il complesso spaziale stava sorvolando la superficie terrestre a una quota di 380 km. I due hanno indossato la nuova tuta per attività extraveicolari di fabbricazione cinese denominata Feitian.
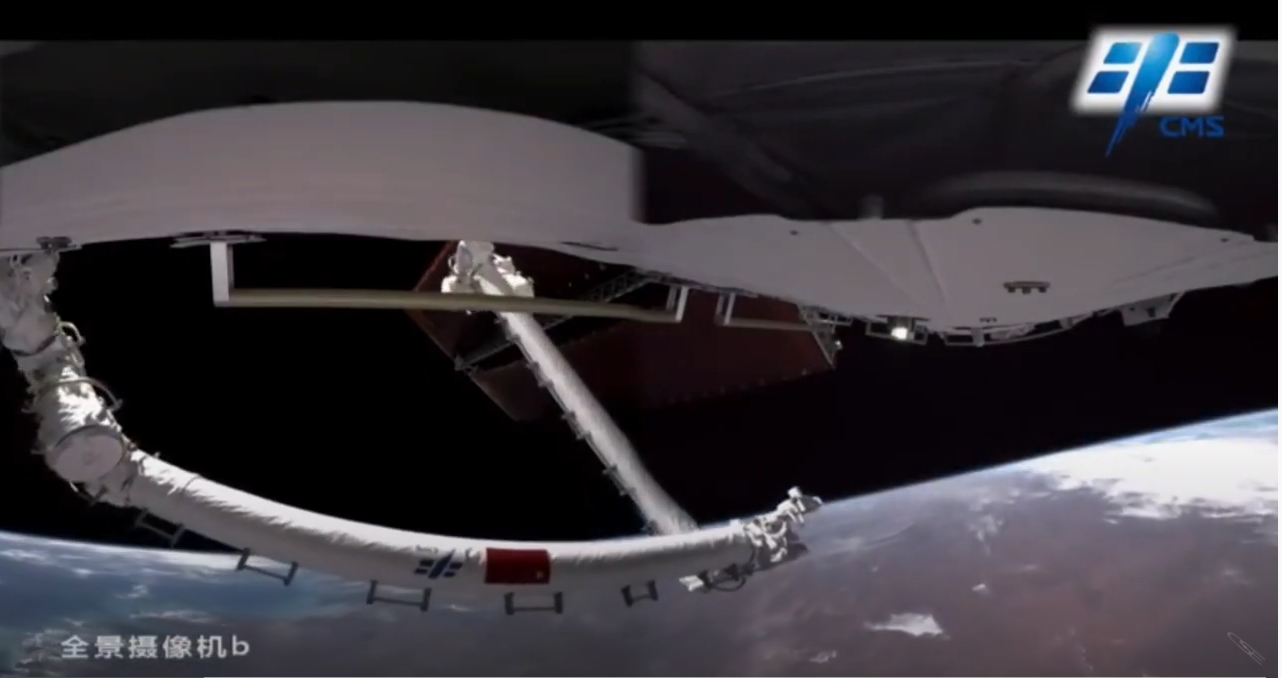
Liu ha lavorato mentre era agganciato all’estremità del braccio robotico tramite l’apposita pedana per fissare i piedi, mentre Tang si è mosso tramite le maniglie di cui è dotato l’esterno della stazione; infine sul braccio è stata installata una piattaforma da lavoro, mentre una videocamera panoramica è stata piazzata all’esterno del complesso spaziale, secondo quanto dichiarato dalla China Manned Space Agency (CMSA). Il comandante della missione Shenzhou 12, Nie Haisheng è rimasto all’interno di Tianhe per assistere i compagni manovrando il braccio robotico.
Si è trattato della seconda attività extraveicolare della storia del programma spaziale cinese. Essa ha seguito dopo quasi 13 anni quella di Zhai Zhigang, che avvenne nel settembre 2008 durate la missione Shenzhou 7 e che durò 22 minuti. In quell’occasione, Zhai indossò un modello precedente di tuta russa Orlan.

Le riprese televisive provenienti dal Beijing Aerospace Flight Control Center (BACC) e trasmesse dalla CCTV, hanno mostrato Tianhe da diverse angolazioni oltre alle immagini soggettive riprese dalle helmet cam situate sui caschi dei due astronauti. Le comunicazioni fra Tianhe e il controllo di missione, sono state mantenute dai satelliti ripetitori Tianlian, posizionati in orbita geostazionaria.
Il primo giorno di luglio, durante i preparativi per l’uscita extraveicolare, Nie ha assistito Liu e Tang nei test sulle tute Feitian e nelle verifiche sul portello di uscita, situato nel compartimento di aggancio della stazione cinese.
I due astronauti sono rientrati nel modulo Tianhe alle 8:57 italiane di domenica 4 luglio concludendo una storica impresa. Una seconda attività extraveicolare è prevista nel corso dei tre mesi di permanenza dell’equipaggio di Shenzhou 12 su Tianhe.
La stazione spaziale cinese
Tianhe è il primo di tre moduli che andranno a formare la stazione a forma di “T”. Esso è lungo 16,6 metri ed è largo 4,2 metri e fornirà supporto vitale rigenerativo e alloggio agli astronauti, oltre a essere dotato di un proprio sistema propulsivo. L’astronave Shenzhou 12 si è agganciata a Tianhe il 17 giugno scorso, sei ore e 32 minuti dopo il lancio dalla base di Jiuquan.
Shenzhou 13 è stata approntata per un lancio di emergenza, ma il suo decollo è previsto per ottobre, mentre in settembre partirà l’astronave cargo Tianzhou 3 per portare i rifornimenti sulla stazione. L’equipaggio di Shenzhou 13 resterà sulla stazione per sei mesi.
Nel 2022 verranno collocati in orbita i due moduli per gli esperimenti Wentian e Mengtian; ciascuno di essi, del peso di circa 20 tonnellate, una volta raggiunta la stazione, verrà manipolato dal braccio robotico dell’avamposto spaziale cinese lungo 10,2 metri per essere agganciato al modulo centrale. I due moduli laboratorio verranno agganciati alla parte anteriore di Tianhe in quanto le limitazioni dovute alla presenza degli ugelli del sistema di controllo attitudinale impediscono l’aggancio ai boccaporti laterali del modulo centrale. Xuntian, il telescopio ottico co-orbitante simile allo storico telescopio della NASA Hubble, verrà lanciato nel 2024. La stazione spaziale cinese può essere ingrandita da tre a sei moduli, se tutto proseguirà secondo i piani.
I manipolatori esterni
Il braccio robotico di Tianhe è dotato di sette giunti e due terminazioni dotate di estremità attive, è in grado di movimentare carichi fino a 25 tonnellate e ha un’accuratezza di posizionamento di 45 mm. Esso viene impiegato per trasferire esperimenti, moduli ed equipaggiamenti e anche durante le attività degli astronauti all’esterno, per muovere carichi, attrezzature e uomini.
Un altro braccio meccanico, più piccolo, servirà anch’esso per spostare i moduli durante le fasi finali di assemblaggio della stazione, dal boccaporto di prua ai loro portelli laterali definitivi del modulo centrale Tianhe. Una volta completata questa fase, la stazione spaziale cinese avrà la configurazione definitiva a forma di “T” e una massa complessiva di 66 tonnellate.
L’assemblaggio della stazione spaziale cinese è iniziato lo scorso aprile con il lancio del modulo Tianhe con un razzo Lunga Marcia 5B, di seguito a maggio è stato lanciato il cargo automatico Tianzhou, il quale si è agganciato autonomamente a Tianhe, infine lo scorso mese di giugno è stata la volta del primo equipaggio a raggiungere la stazione a bordo della Shenzhou 12.
Fonti: spacenews.com; spaceflightnow.com
 Questo articolo è copyright dell'Associazione ISAA 2006-2026, ove non diversamente indicato. - Consulta la licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
Questo articolo è copyright dell'Associazione ISAA 2006-2026, ove non diversamente indicato. - Consulta la licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
