






ESA Lunar Robotics Challenge: due squadre italiane tra i finalisti europei
Tra le città italiane che hanno il privilegio di avere due squadre sportive di un livello così alto da poter competere nel massimo torneo europeo, la città di Pisa fa la sua entrata nella nuova e inusuale disciplina della robotica lunare.
Tra le otto squadre europee che si sono qualificate per la finale della prima sfida per lo sviluppo di veicoli robotici lunari lanciata dall’Agenzia Spaziale Europea, la 'ESA Lunar Robotics Challenge', ci sono due squadre italiane entrambe di Pisa, una proveniente dalla Scuola Superiore Sant’Anna e l’altra dall’Università di Pisa.
Le due squadre italiane competeranno con le altre sei provenienti da Brema (Germania), da Madrid (Spagna), Oulu (Finlandia), Surrey (Gran Bretagna) e Zurigo (Svizzera). La gara finale avrà luogo il 24 e 25 ottobre 2008 in una località segreta nelle Isole Canarie in Spagna.
La località è stata scelta dall’ESA per la sua topografia paragonabile a quella che le future missioni internazionali robotiche o umane sulla Luna troverebbero ai poli del nostro satellite naturale.
La prima di queste ‘sfide’ è stata lanciata dall’ESA a marzo 2008 attraverso un invito pubblicato su Internet e aperto agli studenti universitari interessati, provenienti dai 17 Stati Membri, a creare un robot mobile innovativo capace di muoversi su terreni ostici e di rilevare campioni da crateri che abbiano caratteristiche simili a quelli lunari.
Le proposte da sottoporre all’ESA per la sfida dovevano descrivere il progetto di un veicolo capace di prelevare campioni di suolo da un cratere e la relativa stazione per le operazioni in remoto. Era stato richiesto che i veicoli non pesassero più di 100 kg, non consumassero energia per più di 2 kW e non occupassero un volume superiore ai 0,5 metri cubi comprese le appendici dispiegabili stivate. Dovevano, inoltre, essere gestiti in modalità remota da una stazione situata fuori dal cratere e senza visibilità diretta sul cratere o sul suo orlo.
Le missioni di questi veicoli prevedevano i seguenti obiettivi: spostamento dal ''sito di atterraggio'' all’orlo di un cratere simile ad uno lunare; discesa nel cratere affrontando un’inclinazione fino a 40 gradi; capacità di operare alla luce del sole sull’orlo del cratere così come in condizioni di oscurità all’interno del cratere dopo il tramonto del sole; raggiungimento del fondo del cratere ad una profondità di 15 m; localizzazione e recupero dal fondo del cratere di almeno 100 g di campioni selezionati di terreno identificabile visivamente e ritorno all’orlo del cratere e successivamente al ''sito di atterraggio'' con i campioni prelevati.
La data di scadenza per presentare le proposte era il 29 aprile e otto di queste sono state poi selezionate per essere finanziate dal Programma degli Studi Generali dell’ESA a seguito di una valutazione fatta da un team di esperti ESA guidati da Gianfranco Visentin, Capo della Sezione di Tecnologia d’Automazione e Robotica presso ESTEC, il centro ESA per la ricerca e la tecnologia spaziale, a Noordwijk, in Olanda.
Tra le proposte dei finalisti c’era un robot chiamato ‘’pESApod’’ (da pronunciare: Pisapod) proposto e costruito da una squadra di studenti guidata dal Professore Stefano Roccella, Assistente presso il Settore di Ingegneria della Scuola Superiore degli Studi Universitari e di Perfezionamento Sant’Anna, di Pontedera (Pisa).
È interessante notare l’indirizzo della scuola che si trova in via Rinaldo Piaggio, il fondatore della industria Piaggio, un indirizzo evidentemente abitato da un genius loci propizio allo sviluppo di ingegnosi mezzi di trasporto. ''Il robot che resta sulla terra pensando alla luna'' – è così gli studenti del Sant’Anna descrivono il loro pESApod – si muove usando arti mobili simili a zampe che lo fanno assomigliare ad un ragno.
Per gli studenti che lavorano su pESApod, l’estate 2008 non è certo stata un’estate di relax e vacanze. Il team del progetto meccanico ha lavorato tutta l’estate per trasformare le idee iniziali in modelli e disegni realizzabili da poter spedire alle aziende. Sono sorti anche problemi di carattere tecnologico e pratico che hanno costretto la squadra ad eseguire diversi cambiamenti al progetto preliminare.
Le linee guida principali del loro lavoro si sono basate sulla massima riduzione di peso e il mantenimento di un processo di fabbricazione e assemblaggio quanto più semplice possibile. Anche aver dovuto rispettare tempi così stretti è risultato molto importante. La squadra ha evitato, per questo, di usare componenti che non avrebbero potuto essere consegnati in tempo.
Il risultato è stato presentato al pubblico il 9 ottobre in occasione dell’evento di Open Day presso il Polo Sant’Anna Valdera. Il 18 ottobre, pESApod sarà spedito nelle Isole Canarie per difendere i colori del Sant’Anna il 24 e 25 ottobre.

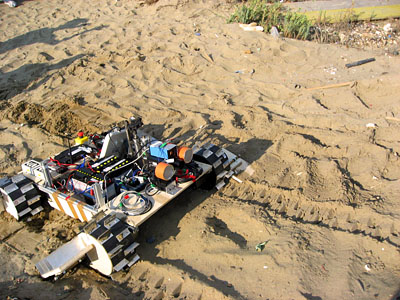
L’altra squadra di Pisa, del Centro di Ricerca Interdipartimentale Enrico Piaggio della Facoltà di Ingegneria dell’Università di Pisa, guidata dal Professor Antonio Bicchi, ha realizzato un veicolo lunare chiamato David che si muove su ruote in linea con il loro personale genius loci, ossia Enrico Piaggio, figlio di Rinaldo Piaggio, che ha guidato l’industria Piaggio fino alla produzione di velivoli, della Vespa e altri mezzi di trasporto su ruote.
Il veicolo lunare David è fornito di un braccio robotico montato con un cavo a bordo della piattaforma mobile del veicolo. Il braccio può facilmente raggiungere la distanza di diversi metri dalla sua base sulla Terra con sufficiente precisione e una distanza anche maggiore in condizioni di gravità bassa come sulla Luna. Questa idea riduce il percorso che il robot deve affrontare e potrebbe addirittura evitargli una discesa completa fino al fondo del cratere lunare.
La capacità di David di scavalcare un ostacolo sabbioso e stata testata prima all’interno del laboratorio universitario usando una sabbia molto fina in grado di mantenere un’inclinazione di circa 40 gradi. Dopo gli incoraggianti risultati ottenuti in laboratorio, si è passati a testare all’esterno diversi tipi di ruote precisamente sulla spiaggia di Tirrenia e di Parco San Rossore, località vicino Pisa, dove il rover ha dimostrato di poter affrontare un’inclinazione di 35 gradi.
Pronto per andare sulla Luna, David ha debuttato ufficialmente davanti alla Facoltà di Ingegneria dell’Università di Pisa e l’11 ottobre, la ‘squadra lunatica’, come loro stessi si definiscono, è partita alla volta delle Isole Canarie con un camion, viaggiando prima dall’Italia alla Spagna a bordo di un traghetto e poi dalla terraferma spagnola a bordo di un’altra nave verso la misteriosa isola dove avrà luogo la finale e dove la squadra prevede di arrivare con la loro attrezzatura tecnica al completo in tempo per un ultimo test e prove pratiche che inizieranno il 21 ottobre per poi arrivare alla gara finale del 24 e 25 ottobre.
Il nome dell’isola e la località precisa dove avrà luogo la gara saranno svelate al pubblico solo il 26 ottobre, al momento della proclamazione della squadra vincente da parte dell’ESA.
Questa decisione rientra nell’accordo tra l’ESA e le autorità delle Isole Canarie che hanno gentilmente messo a disposizione un paesaggio lunare, situato al centro di un parco naturale, che ha capacità molto limitate di accesso e sistemazione per i visitatori.
In modo da proteggere il sito da qualsiasi indesiderato disturbo, l’ESA ha rispettato la richiesta delle autorità responsabili del parco naturale di non attirare l’attenzione dei visitatori sulla gara.
Pur dovendo tenere lontani dal sito della gara le famiglie, gli amici e i colleghi delle squadre in gara, così come il pubblico interessato, sarà possibile condividere in tempo reale questa esperienza unica: il Telecom Lab di ESA/ESRIN, infatti, invierà sul sito una stazione mobile satellitare per la comunicazione che non solo permetterà alle squadre in gara di navigare in Internet e rimanere in contatto con i loro rispettivi istituti, ma permetterà di trasmettere i test di prova e la gara finale via Internet video streaming anche agli spettatori interessati in Europa e in tutto il mondo. Non appena conosciuti, parametri e tempi di trasmissione saranno annunciati su questo sito Internet.
Mentre i test di prova dal 21 al 23 ottobre si svolgeranno durante le ore del giorno con luce solare, le gare vere e proprie del 24 e 25 ottobre si svolgeranno la sera e a notte fonda in modo da simulare lo scenario lunare.
Il rover viaggerà dal sito di atterraggio all’orlo del cratere con la luce del sole mentre scenderà all’interno del cratere con il sole in ombra, che sulla Luna, dunque senza un’atmosfera, si traduce in un ambiente in totale oscurità che, invece, sulla Terra è possibile trovare solo in piena notte. I robots, quindi, saranno provvisti di luci in modo da navigare, localizzare e raccogliere campioni di suolo che simulano quelli lunari.
 Questo articolo è copyright dell'Associazione ISAA 2006-2026, ove non diversamente indicato. - Consulta la licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
Questo articolo è copyright dell'Associazione ISAA 2006-2026, ove non diversamente indicato. - Consulta la licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
