






ATV-4 “Albert Einstein” è arrivato a destinazione

ATV-4, il veicolo spaziale di concezione e realizzazione europea, è arrivato a destinazione dopo un volo di dieci giorni. L’attracco è avvenuto con successo alle 14:07 GMT (le 16:07 italiane) del 15 giugno.
Pochi giorni fa la Progress M-19M si era sganciata dalla ISS per fare posto ad ATV-4, con una manovra tenuta particolarmente sotto controllo in quanto si sospettava il danneggiamento di alcuni apparati utili alla navigazione.
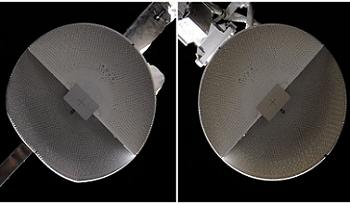
a sin. si nota la deformazione dell’antenna KURS rispetto ad una normale (C) NASA, nasaspaceflight.com
In particolare si ipotizzava che al momento del docking dello scorso aprile la capsula sovietica avesse urtato il Laser Retro Reflector (LLR), un sistema di supporto alla navigazione montato su Zvezda ed usato anche dagli ATV durante l’attracco, a causa del mancato dispiegamento dell’antenna KURS durante le fasi finali di avvicinamento.
Solo al momento del distacco della Progress è stato possibile verificare i danni e le eventuali problematiche. L’antenna KURS dispiegandosi ha portato alla luce una deformazione, segno che il contatto era avvenuto. Nessun danno però è stato riscontrato sulla parte anteriore di Zvezda e nessuna conseguenza al sistema LRR. Via libera quindi al veicolo di trasporto automatizzato “Albert Einstein”, che è attraccato alla porta del modulo di servizio Zvezda in precedenza occupata dalla Progress M-19M.
La manovra di rendez-vous si divide in particolari punti di avvicinamento.
- Il punto S1, che si trova a 30 Km dalla ISS, ha segnato l’inizio ufficiale della manovra di avvicinamento.
- Il punto S2, situato a 3.5 Km dalla ISS. In questa particolare posizione, secondo quanto riportato dal sito nasaspaceflight.com, uno dei razzi di manovra ha dato alcuni problemi, ma i controllori di volo hanno comunque dato il GO al proseguo delle operazioni.
- Il punto S3, a 250 metri di distanza dalla stazione. In questo caso il passaggio al punto successivo è stato ritardato di qualche minuto per completare alcune operazioni sui computer di bordo.

ATV-4 durante la fase S3 con ben visibili i razzi di manovra in azione (C) NASA Tv

- Il punto S4, a 20 metri di distanza dalla ISS. Qui comincia la fase “Final Approach 1” (FA1). Con delle accensioni mirate (via via meno intense) i razzi di manovra hanno avvicinato progressivamente il cargo ed effettuato delle manovre correttive di assetto e posizione relativa.
-
Completate le manovre previste per la fase FA1. con l’ATV-4 allineato al modulo di servizio e alla sua porta di attracco si è dato il via alla fase di approccio finale FA2, che ha portato il cargo a 12 metri dalla ISS. La manovra è stata costantemente monitorata dall’equipaggio della ISS fino al punto denominato CHOP (Crew Hands Off Point)
-
Al punto CHOP l’ATV si trovava a solo un metro dalla destinazione. Si tratta di una fase critica in quanto in questa posizione non è più possibile effettuare manovre di evasione.
- Un’ultima breve accensione del sistema RCS ha spinto ATV-4 verso il modulo Zvezda, raggiunto senza problemi. Poco dopo il contatto fisico tra i due veicoli la sonda di attracco è stata retratta ed il “docking” finalizzato.
Anche se ATV si trova ormai saldamente ancorato alla Stazione Spaziale gli astronauti non faranno ingresso nel modulo europeo fino a lunedì 17 giugno, data prevista per l’apertura del portello.
Il 24 giugno il modulo verrà richiuso perché avrà luogo la EVA 33. Durante questa passeggiata spaziale si dovrà essere pronti ad un eventuale sganciamento di emergenza in caso problemi alla camera di compensazione, indispensabile per il rientro alla stazione degli astronauti.
Come già accennato nei precedenti articoli, l’Albert Einstein è quello che ha trasportato la maggior quantità di materiale tra tutti gli ATV. Si calcola che per completare le operazioni di carico e scarico saranno necessarie almeno 75 ore lavorative. A questo proposito sono state introdotte alcune novità alle operazioni in programma: verrà testato un nuovo metodo per ridurre i tempi necessari per il maneggio del carico, che vedrà Luca Parmitano in veste di “loadmaster” a capo delle operazioni di movimentazione e stoccaggio. Sarà infatti il nostro connazionale a dirigere e tenere traccia degli spostamenti del carico, a differenza del precedente metodo che vedeva ogni astronauta gestire le sue proprie attività in maniera indipendente.
ATV-4 provvederà anche ai “reboost” della ISS con accensioni programmate: la prima (di test) il 19 giugno e la seconda il 10 di luglio. Il cargo europeo sarà inoltre utile nel caso si rendessero necessarie “Debris Avoidance Manouvers”, cioè accensioni atte a variare leggermene l’orbita della ISS per scongiurare impatti con detriti spaziali.
La partenza di ATV-4 è al momento programmata per il 28 ottobre 2013. Il rientro avverrà in una zona sicura a sud dell’ Oceano Pacifico.
Fonti: ESA, nasaspaceflight.com.
(C) immagini ESA, NASA
 Ove non diversamente indicato, questo articolo è © 2006-2024 Associazione ISAA - Leggi la licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
Ove non diversamente indicato, questo articolo è © 2006-2024 Associazione ISAA - Leggi la licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
