


Il rover della NASA, Curiosity, ha eseguito la traversata piu lunga fino ad oggi da quando è atterrato nell’agosto del 2012. Lo scorso 21 luglio infatti, Curiosity si è spostato di poco più di 100 metri, più del doppio del record precedente.
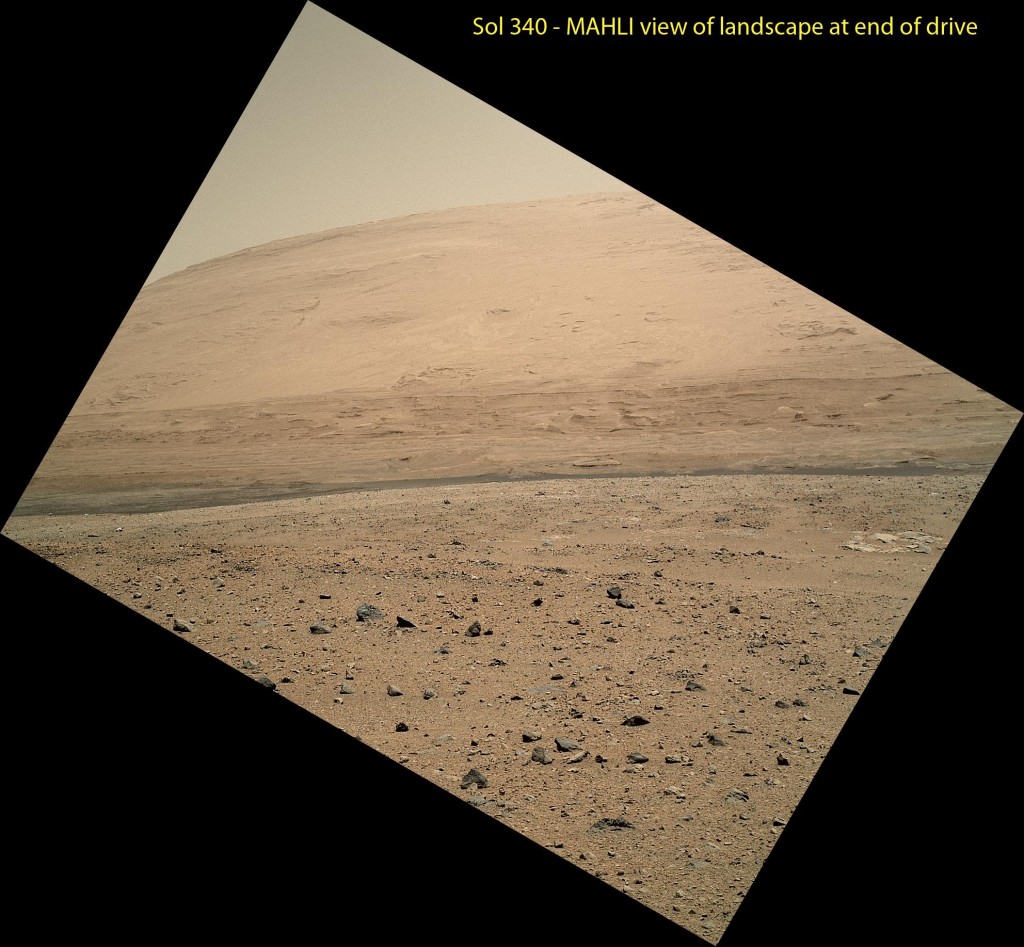
La lunghezza dello spostamento è stata resa possibile anche dal fatto che il sol numero 340 della permanenza del rover su Marte si era aperto con un visuale perfetta ed ampia del terreno di fronte a sé, cosa che ha permesso agli ingegneri di NASA di pianificare un percorso sicuro per Curiosity. Nelle prossime settimane il team di Curiosity ha intenzione di cominciare ad utilizzare l'”autonav”, ovvero la capacità di muoversi tra due punti in maniera autonoma, rendendo più frequenti queste lunghe traversate.
Curiosity è partito tre settimane fa dal sito di Glenelg, dove ha lavorato per la prima metà del 2013, ed è ora all’inizio del lungo viaggio verso la base del Monte Sharp, che durerà alcuni mesi. Il record di traversata precedente era di 49 metri, stabilito durante il sol 50 (26 settembre 2012). Dopo aver completato il viaggio di 100 metri, Curiosity ha superato ancora il precedente record il 23 luglio (sol 342), guidando per 62 metri e portando la distanza totale percorsa dall’inizio della missione a 1,23 km.
Il percorso del sol 340 prevedeva tre segmenti, con cambi di direzione alla fine dei primi due segmenti. I “piloti” del rover hanno utilizzato informazioni provenienti dalle immagini stereo della Navigation Camera (Navcam) in combinazione con quelle provenienti dal teleobiettivo della Mast Camera (Mastcam). Durante il percorso, il rover ha anche utilizzato le immagini riprese durante il viaggio per calcolare la distanza percorsa, in modo da verificare che le ruote non avessero slittato troppo nella loro rotazione.
“Ciò che ci ha permesso di guidare il rover così lontano nel sol 340 è stata la partenza da un punto elevato e, avendo a disposizione le immagini dalla Mastcam che ci davano informazioni sulle dimensioni delle rocce, potevamo essere sicuri che non ci fossero pericoli”, ha dichiarato Paolo Bellutta, uno dei piloti del rover presso il Jet Propulsion Laboratory (JPL) di NASA. “Potevamo vedere fino ad una buona distanza, ma c’era una zona direttamente di fronte a noi che non era visibile chiaramente, e quindi abbiamo dovuto trovare un percorso che ci girasse intorno”
Il rover puntava verso sud ovest all’inizio del sol. Prima di partire ha girato leggermente verso ovest e, nel primo tratto, ha utilizzato le capacità di odometria visuale per raggiungere la distanza prefissata di 50 metri prima di voltare verso sud. Il secondo tratto, la curva successiva ed il segmento finale sono stati invece completati senza utilizzare l’odometria visuale, anche se il rover ha utilizzato una nuova capacità: quella di accendere autonomamente l’odometria visuale nel caso che la pendenza o altri fattori superassero il limiti prefissati.
Il nuovo software su Curiosity dà al rover la capacità di utilizzare l’odometria visuale in un intervallo di temperature. L’aggiornamento si era reso necessario in quanto i test della scorsa primavera avevano evidenziato che la Navcam collegata con i computer del “lato B” di Curiosity erano più sensibili del previsto alla temperatura. In assenza della compensazione via software, l’analisi delle immagini stereo avrebbe indicato distanze diverse per lo stesso punto nello spazio, a seconda delle diverse temperature a cui erano state prese le immagini. Il rover aveva cominciato ad utilizzare i computer di backup del lato B a causa di alcuni problemi, poi risolti, riscontrati il 28 febbraio 2013 alle memorie flash del lato A. La Navcam collegata con il lato A aveva dimostrato una minore sensibilità alle temperature rispetto a quella attualmente in utilizzo.
“Per ora stiamo utilizzando l’odometria visuale solo per il controllo dello slittamento”, ha dichiarato Jennifer Trosper, vice direttrice di progetto per Curiosity al JPL. “Stiamo validando il sistema per iniziare ad usare l’autonav a temperature diverse”. La navigazione autonoma permetterà ai piloti del rover di muovere Curiosity su percorsi che vadano oltre a quelli che è possibile prevedere dalle immagini riprese nei sol precedenti.
Curiosity era atterrato presso il sito “Bradbury” nel cratere Gale il 6 agosto 2012. Da lì il rover si è spostato verso Glenelg, ad est, dove ha raggiunto l’obiettivo scientifico primario della sua missione, cioè trovare le prove di un antico ambiente umido che avesse condizioni favorevoli allo sviluppo della vita microbica. Il rover si sta ora dirigendo verso sud ovest. Sul Monte Sharp, al centro del cratere Gale, gli scienziati sperano di trovare indizi per studiare l’evoluzione nel tempo dell’ambiente marziano.
Fonte: NASA
![]()
