






Prende forma il rover marziano del 2020
Dopo un lungo processo di analisi e sviluppo NASA è pronta per l’ultima fase di progettazione e produzione del prossimo rover che esplorerà il pianeta rosso.
Il lancio della prossima missione marziana con un rover è prevista per la finestra che si aprirà nell’estate del 2020, con un arrivo sul suolo di Marte nel Febbraio 2021.
Il rover esplorerà una regione di Marte che in passato potrebbe aver ospitato forme di vita microbiche. Il sito proposto di atterraggio è il cratere Jezero situato nell’area Syrtis Major alle coordinate 18.855°N 77.519°E. Durante l’esplorazione, che dovrebbe durare almeno un anno marziano (687 giorni), il rover sarà anche in grado di raccogliere campioni di roccia e suolo che potranno essere recuperati in una futura missione di ritorno a Terra.
“Il rover del 2020 è il primo passo di una potenziale campagna “multi-missione” per poter portare sulla Terra campioni selezionati del suolo Marziano” ha dichiarato Geoffrey Yoder, a capo del Science Mission Directorate della NASA.
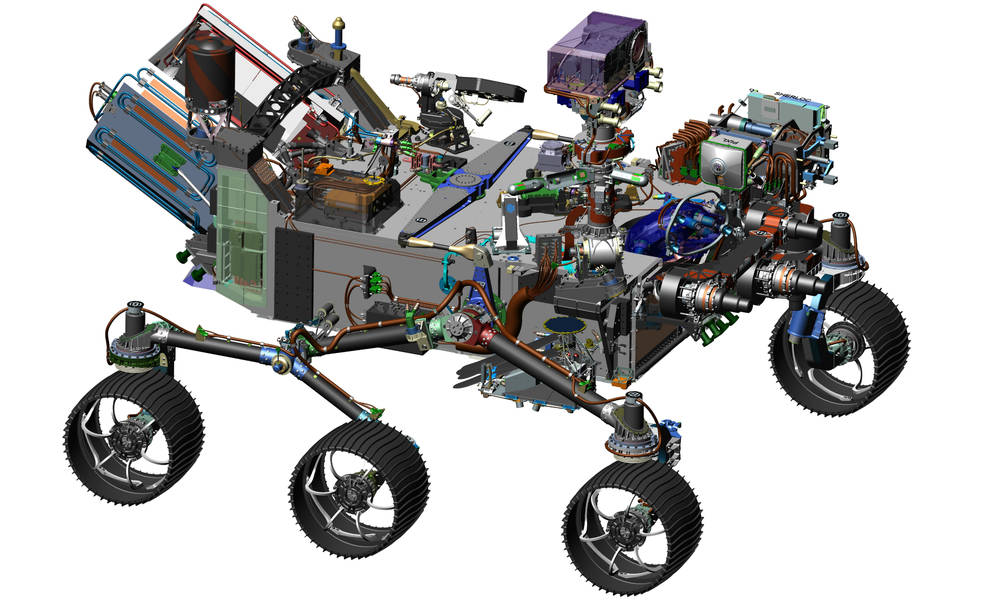
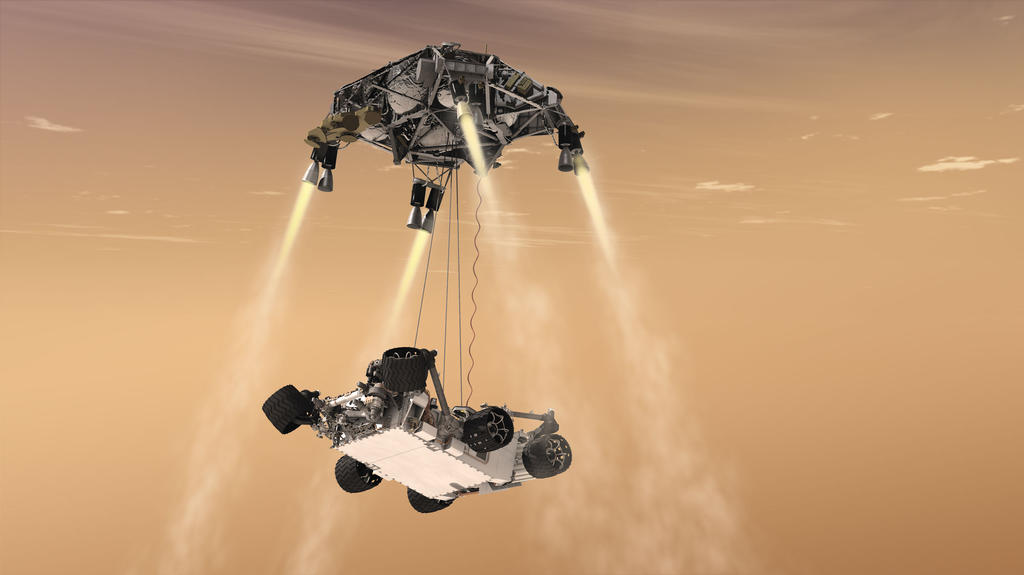
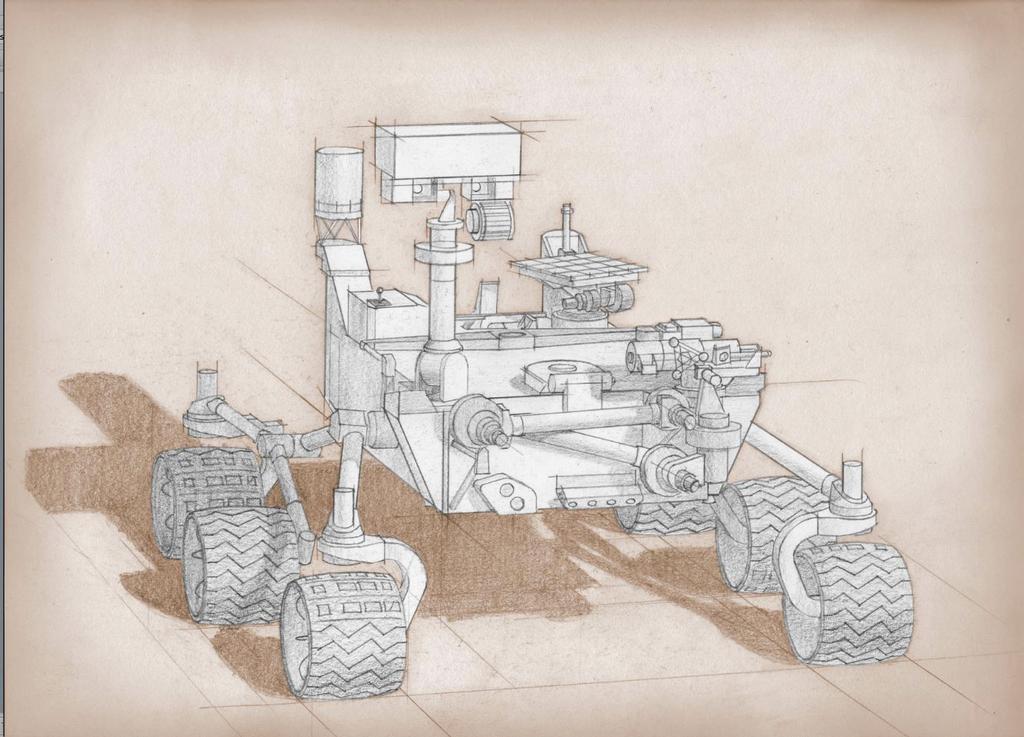
Per ridurre i costi il rover avrà l’aspetto esteriore del suo predecessore da 1 tonnellata attualmente attivo su Marte, Curiosity, dal quale erediterà gran parte della struttura e delle parte meccanica di movimento, compreso il sistema di atterraggio “Skycrane”.
Al suo interno però ospiterà una suite di strumenti scientifici completamente inediti, che permetteranno di eseguire ricerche mai effettuate prima.
IDL TIFF file
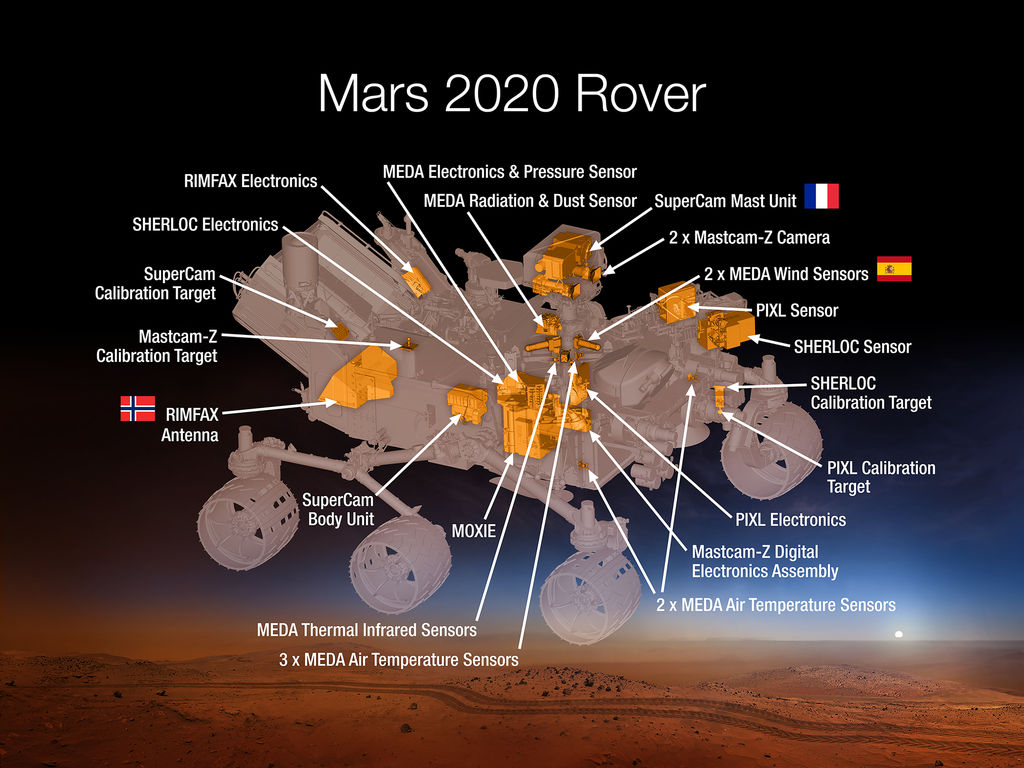
Andando ad esaminare in maniera approfondita il payload del rover troviamo:
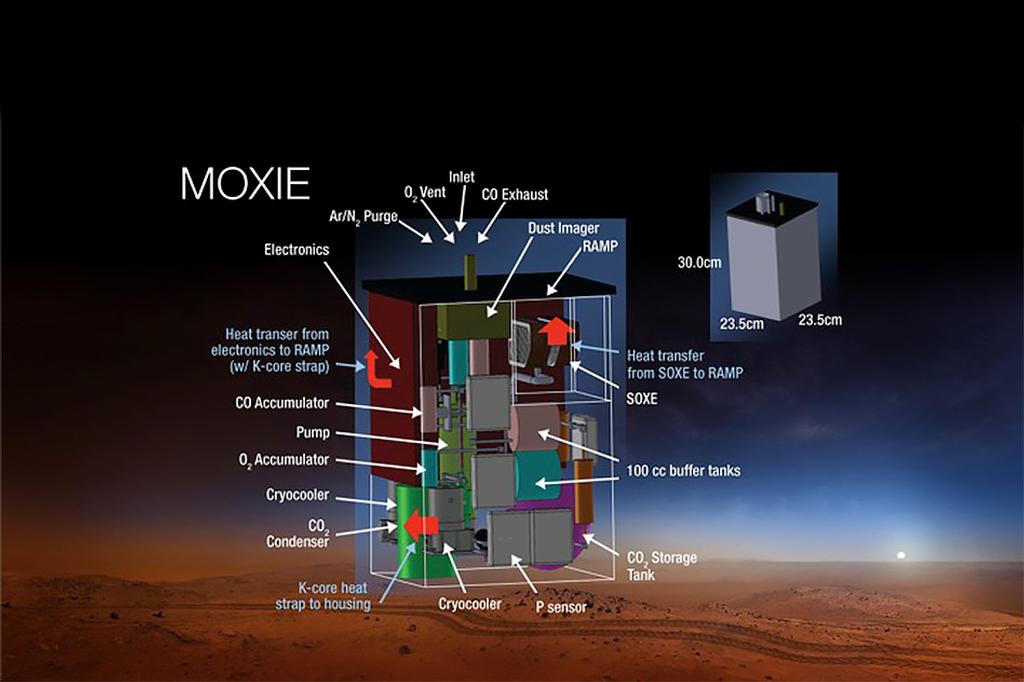
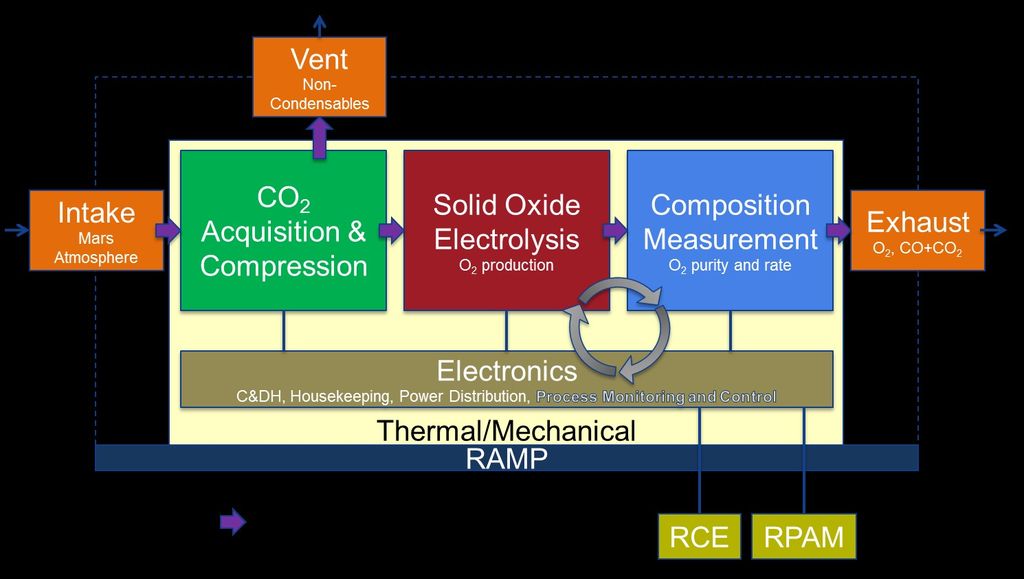
MOXIE (Mars Oxygen ISRU Experiment): è un sistema per validare la tecnologia necessaria a produrre ossigeno partendo dall’anidride carbonica presente in grande quantità nell’atmosfera marziana. È di fondamentale importanza per le future missioni umane. Il principal investigator sarà Michael Hecht del Massachusetts Institute of Technology di Cambridge, Massachusetts.
Mastcam-Z: un sistema di fotocamere panoramiche e stereoscopiche con la possibilità di zoomare otticamente su particolari di maggiore interesse. Lo strumento, fra le altre cose servirà per determinare la mineralogia della zona e come supporto alla navigazione. Il principal investigator sarà James Bell dell’Arizona State University di Tempe.
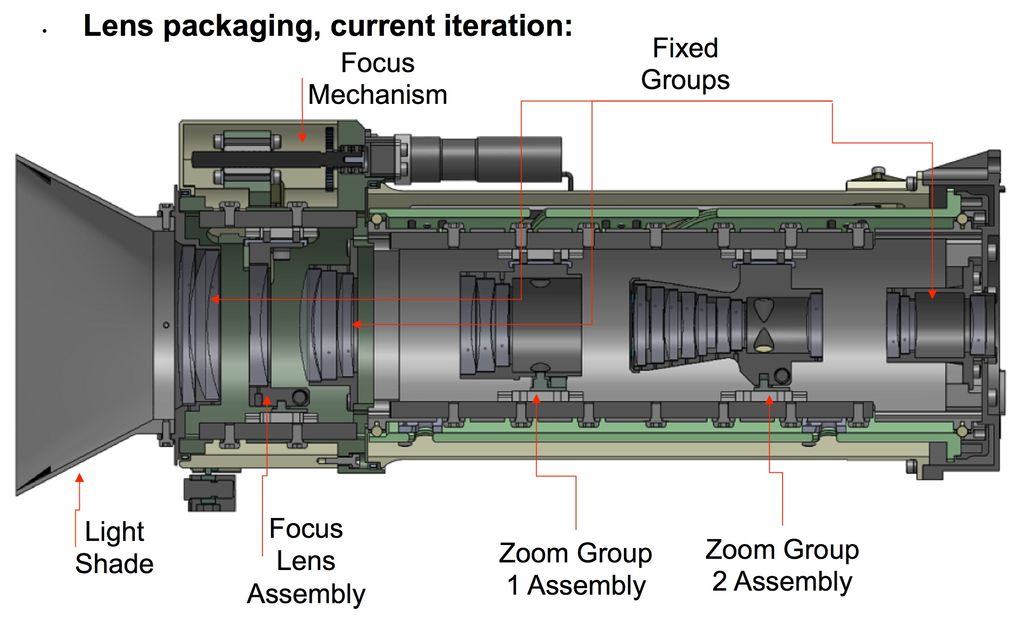
Il sistema di lenti del Mastcam-Z
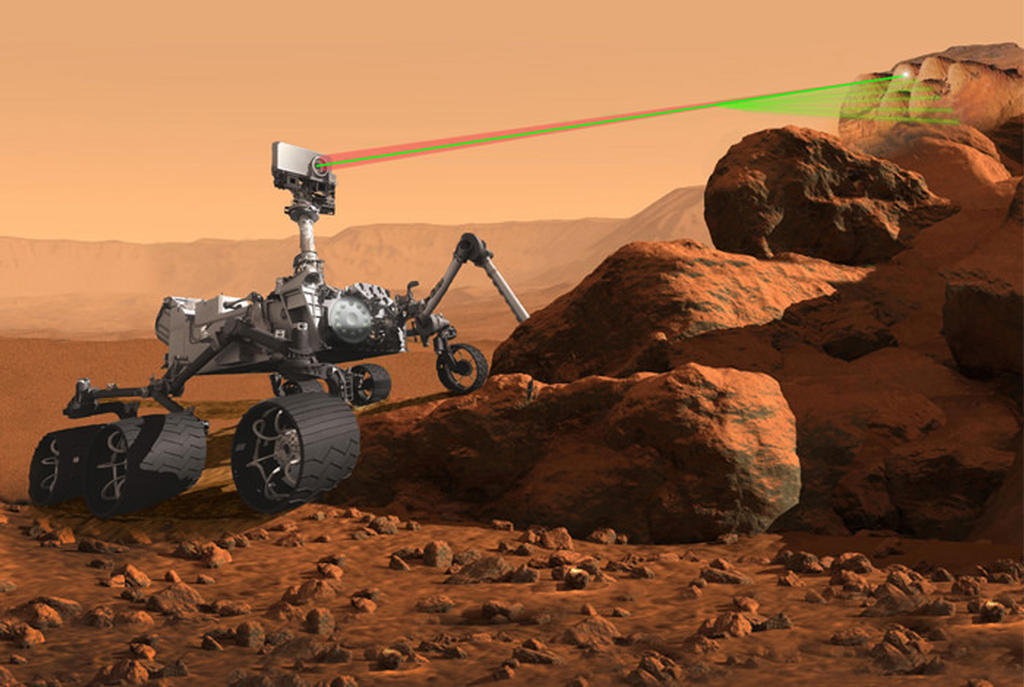
SuperCam: è uno strumento che potrà fornire immagini e l’analisi chimica della composizione mineralogica del sito. Sarà anche in grado di rilevare la presenza di composti organici a distanza. Il principal investigator è Roger Wiens del Los Alamos National Laboratory di Los Alamos, New Mexico. Questo strumento ha una partecipazione significativa del Centre National d’Etudes Spatiales Institut de Recherche en Astrophysique et Planetologie (CNES/IRAP) Francese.
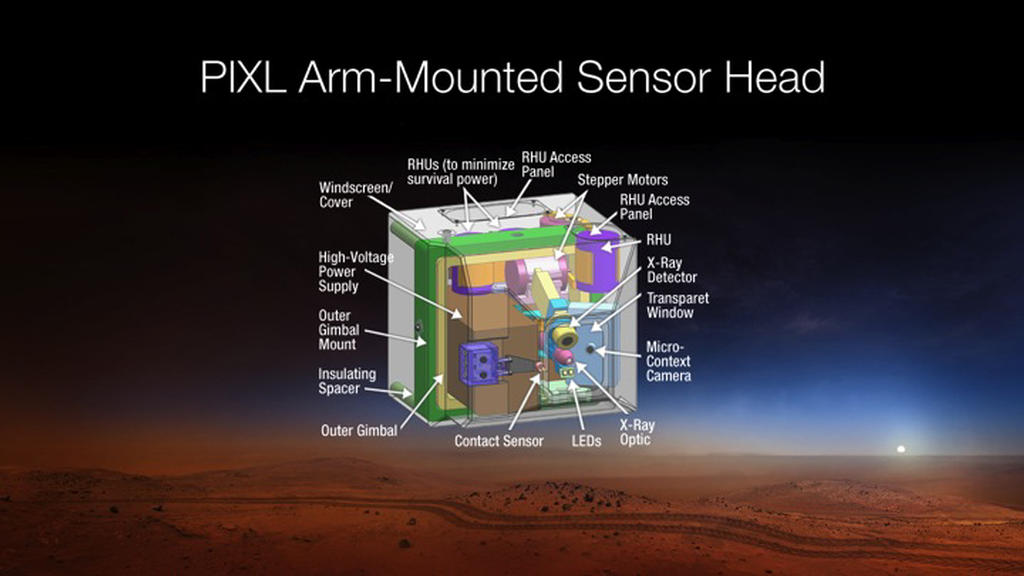
PIXL (Planetary Instrument for X-Ray Lithochemistry): uno spettrometro a fluorescenza X con inclusa una camera ad alta risoluzione, montati sul braccio robotizzato per determinare con precisione gli elementi che compongono i campioni analizzati. La precisione che raggiungerà PIXL sarà la migliore mai avuta per questa tipologia di ricerche su Marte. Il principal investigator è Abigail Allwood, del Jet Propulsion Laboratory (JPL) di Pasadena, California.
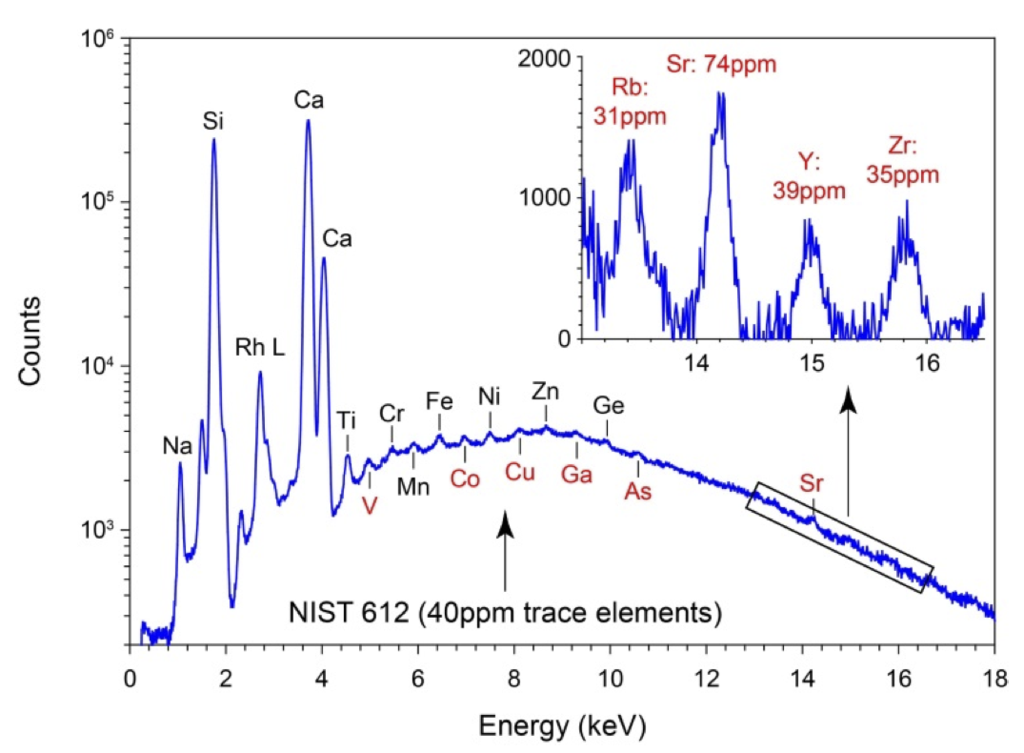
Un esempio di quello che potrà individuare PIXL
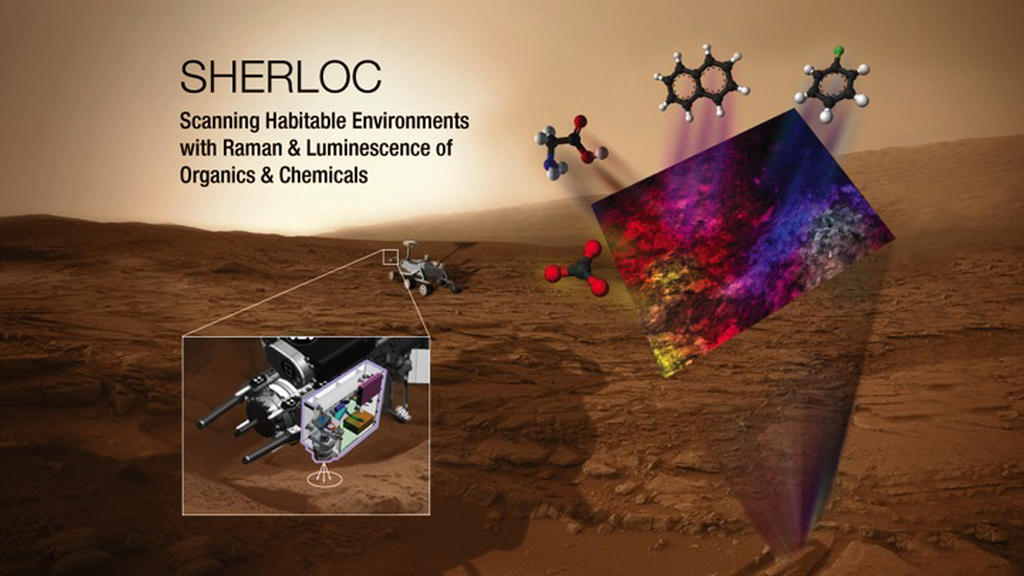
SHERLOC (Scanning Habitable Environments with Raman & Luminescence for Organics and Chemicals): uno spettrometro di precisione che utilizzerà una laser negli ultravioletti per determinare la composizione mineralogica e per scovare tracce di composti organici. SHERLOC sarà il primo spettrometro Raman ad essere utilizzato sulla superficie marziana e servirà a ottenere informazioni complementari rispetto a quelle raccolte dagli altri strumenti. Il principal investigator è Luther Beegle del JPL.
MEDA (Mars Environmental Dynamics Analyzer): è un set di sensori che forniranno misurazioni di temperatura, velocità e direzione del vento, pressione, umidità relativa e forma e dimensione del pulviscolo in sospensione nell’atmosfera. Il principal investigator è Jose Rodriguez-Manfredi del Centro de Astrobiologia del Instituto Nacional de Tecnica Aeroespacial Spagnolo .
RIMFAX (The Radar Imager for Mars’ Subsurface Exploration): un radar in grado di penetrare in profondità il terreno, permettendo di ottenere risoluzioni dell’ordine di centimetri per lo studio della struttura geologica del sito di ricerca. Il principal investigator è Svein-Erik Hamran del Norwegian Defence Research Establishment Norvegese.
Gli obiettivi che potrà raggiungere il rover così equipaggiato saranno molti e i risultati ottenuti permetteranno di conoscere più nel dettaglio le dinamiche che caratterizzano e hanno caratterizzato il pianeta, oltre a definire nel dettaglio le condizioni ambientali attualmente presenti sul pianeta in vista di future missioni di esplorazione umana.
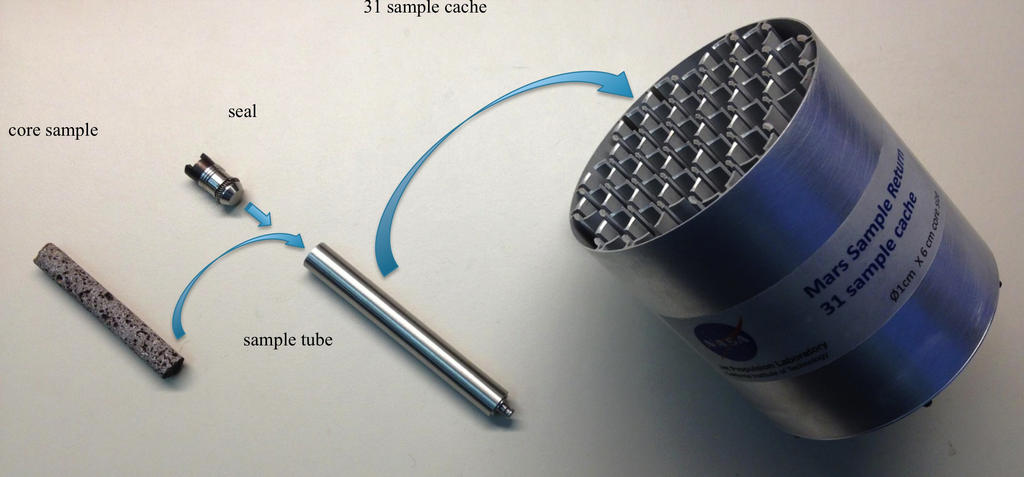
Per quanto riguarda invece la raccolta dei campioni di terreno in vista di una futura missione di recupero, il rover disporrà di circa 30 bussolotti in cui potranno essere inseriti campioni della superficie marziana oppure piccoli carotaggi. Questi saranno depositati in punti predefiniti durante il tragitto di esplorazione, per poi essere recuperati un giorno da una sonda automatica e riportati a terra per un’analisi approfondita.
La parte strutturale e la cellula del rover come detto sarà strettamente derivato da quello del predecessore Curiosity, non mancheranno però le evoluzioni e le migliorie.
In particolare, il sistema di generazione di energia sarà termoelettrico a radioisotopi, ipotizzato come backup per Curiosity, mentre il sistema “skycrane” di atterraggio sarà molto più “intelligente”, potrà infatti contare su due importanti evoluzioni, il “range trigger” e il “Terrain-Relative Navigation”.
Il Range Trigger è il sistema che controlla il timing dell’apertura dei paracadute durante la discesa. Conoscendo la propria posizione rispetto al sito di atterraggio previsto e ritardando o anticipando l’apertura dei paracadute sarà possibile ridurre del 50% l’ellisse di atterraggio, ovvero l’area stimata di arrivo, riducendo quindi i rischi di trovarsi in aree impervie o di scarso interesse.
Fino ad oggi i paracadute delle varie sonde arrivate su Marte sono sempre stati aperti appena la capsula raggiungeva una velocità idonea a farlo, con questo sistema invece il paracadute verrà aperto nel momento più utile per avvicinarsi quanto più possibile al sito di atterraggio, ovviamente rimanendo sempre nei parametri di velocità richiesti.
Se ad esempio il sistema di controllo si accorgesse che il sito venisse superato, questo comanderà un’apertura anticipata rispetto al momento previsto; nel caso opposto se risultasse un arrivo “corto” rispetto al sito previsto, l’apertura verrebbe posticipata aumentando la distanza percorsa in caduta. 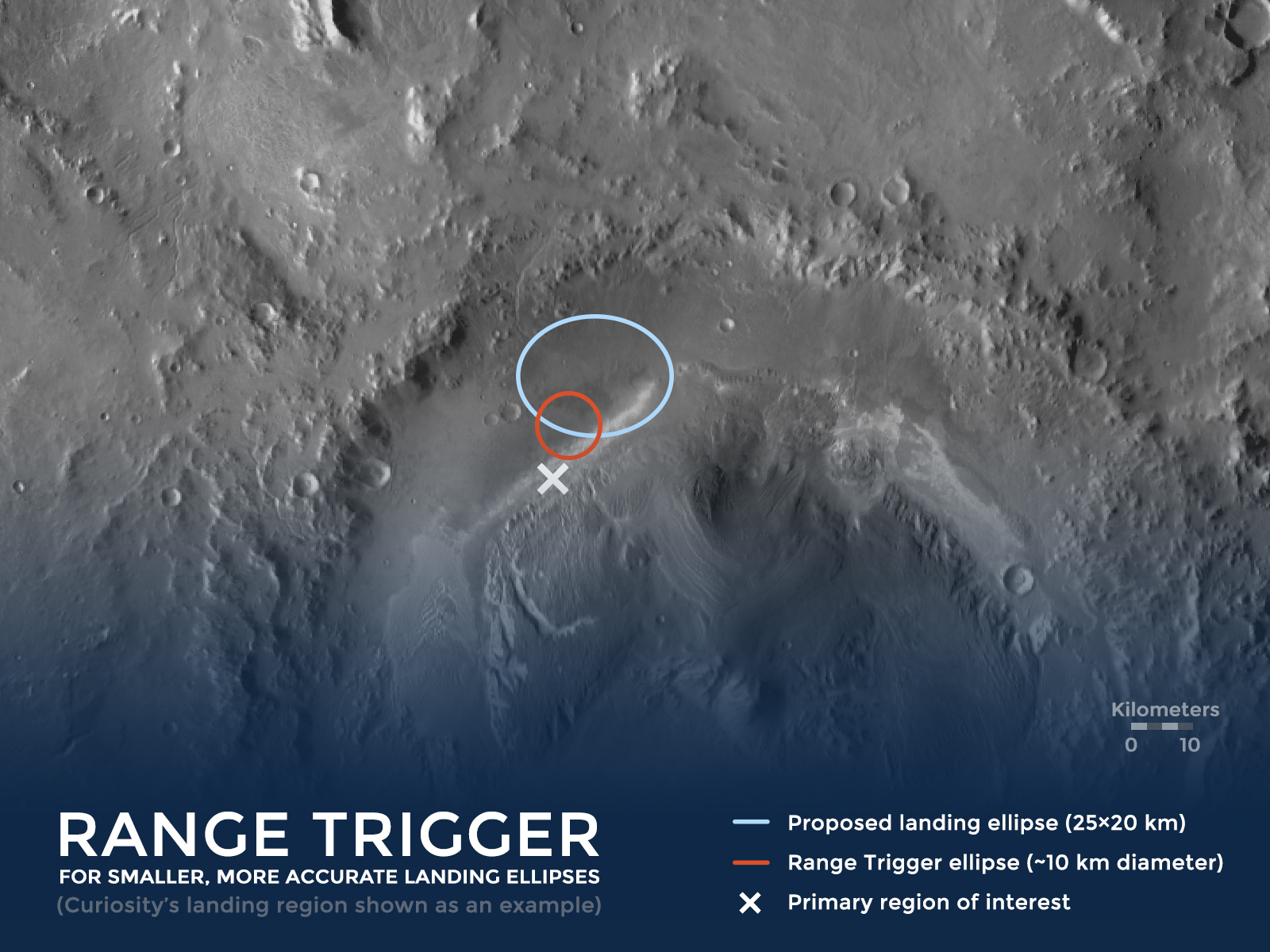
Il Terrain-Relative Navigation è invece un inedito sistema di caratterizzazione del suolo nelle ultimissime fasi dell’atterraggio.
Il computer che governerà questa fase di missione avrà pre-caricata una mappa in alta risoluzione del sito di atterraggio, realizzata negli anni precedenti dalle sonde attualmente in orbita marziana e contenente a sua volta tutte le aree “pericolose” o sconsigliate per l’atterraggio. Durante la discesa il rover raccoglierà immagini in rapida successione della zona che sorvolerà e confrontandole con la mappa conosciuta calcolerà la sua posizione e la zona di arrivo stimata. Se la posizione calcolata venisse considerata pericolosa il sistema di navigazione potrà “spostare” l’arrivo in un’area preferibile nel raggio di 300 m.
Fino ad oggi moltissime delle aree considerate interessanti per la possibile presenza di tracce di composti biologici o strutture geologiche particolari sono state scartate se non presentavano un’area priva di possibili pericoli (rocce, pendii ecc.) per il 99%. Con questo sistema di navigazione però sarà possibile scegliere aree di atterraggio fino ad oggi precluse, permettendo di selezionare aree con pericoli che potranno essere evitati dal Terrain-relative Navigation.
Sempre nella fase di discesa sarà attiva anche la suite di strumenti MEDLI2, che raccoglierà dati quali pressione e temperatura atmosferica e dello scudo termico, permettendo di caratterizzare maggiormente l’atmosfera marziana per le future missioni.
Durante l’atterraggio saranno poi attive diverse telecamere, permettendo di riprendere tutte le fasi con un dettaglio mai raggiunto, ci sarà una telecamera che riprenderà i paracadute, una che riprenderà il suolo in basso sullo stadio di discesa, una sul rover che guarderà in alto verso lo stadio di discesa e una sempre sul rover che guarderà in basso il suolo. A corredo sarà presente anche un microfono che raccoglierà i suoni durante tutte le fasi.
Tutte quest’ultima serie di videocamere, compreso il microfono, hanno come scopo primario quello educativo e di “public engagement”, sarà possibile riprendere come mai prima l’apertura dei paracadute e tutte le fasi con il complesso sistema Skycrane fino all’arrivo sul suolo marziano, regalando al grande pubblico immagini spettacolari e mai viste prima.
 Questo articolo è © 2006-2024 dell'Associazione ISAA, ove non diversamente indicato. Vedi le condizioni di licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.
Questo articolo è © 2006-2024 dell'Associazione ISAA, ove non diversamente indicato. Vedi le condizioni di licenza. La nostra licenza non si applica agli eventuali contenuti di terze parti presenti in questo articolo, che rimangono soggetti alle condizioni del rispettivo detentore dei diritti.

molto interessanti i vostri articoli tecnici Grazie